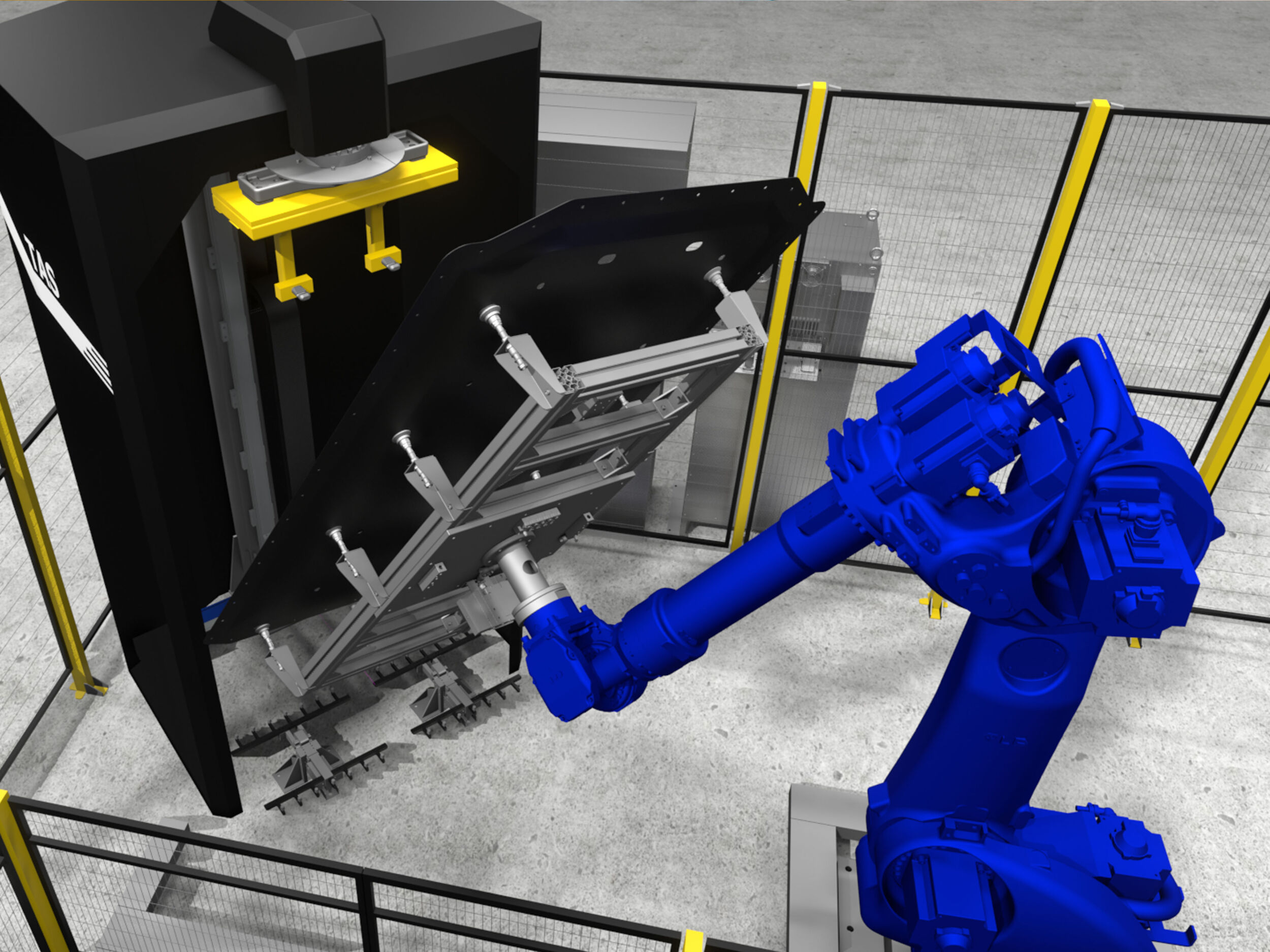
Als ersten Schritt haben die Forschenden einarmige Roboter gängiger Hersteller, die in der Industrie und Forschung eingesetzt werden, untersucht und kategorisiert. Roboterarme sehen zwar oft ähnlich aus, haben aber ihre individuellen Stärken und Schwächen. Die Sensoren, die Motoren sowie das eigentliche Gehirn der intelligenten Maschinen, die Steuerungseinheit, unterscheiden sich. Dadurch entstehen Systeme, die unterschiedliche Grundfähigkeiten aufweisen. Einige sind kraftvoll und präzise in ihrer Bewegung, anderen sanft, flexibel und gefühlvoll im Umgang mit ihrer Umwelt.
Um diese Unterschiede und den kontinuierlichen Fortschritt der Robotik sichtbar zu machen, haben Forschende aus dem AI Robot Safety & Performance Center von TUM MIRMI den so genannten ‚Tree of Robots‘ entwickelt. In Anlehnung an den Baum des Lebens von Charles Darwin stellt er die fundamental unterschiedliche Anpassung verschiedener Spezies an ihren ‚Lebensraum‘ dar, in dem Fall von Robotern. „Dafür schauen wir uns die Grundfähigkeiten eines Roboters an, die in Prozessen benötigt werden, etwa, wie gut er einem vorgegebenen Weg folgt, eine Position einnimmt, wie sanft er Kontakt mit Oberflächen herstellen kann und auch wie sicher er im Umgang mit Kollisionen zwischen Roboter und Mensch ist“, erläutert die Leiterin des Labors Robin Kirschner.
Wie gefühlvoll ist ein Roboter?
Allein für die so genannte Taktilität gibt es 25 Messwerte, die insgesamt beschreiben, wie gefühlvoll der Roboter im physischen Kontakt mit seiner Umgebung ist. Hier geht es u.a. darum, herauszufinden, ob die Kraft, die etwa auf eine Oberfläche aufgebracht werden soll, nicht in Wirklichkeit höher ist als beabsichtigt.
Je nach den Leistungen unterteilen die Forschenden die Roboter in die Klassen Industrial Robots, Cobots, Softrobots sowie Tactile Robots. Geht es um einen Roboter für die Chirurgie, ist für den Roboterarm vor allem Präzision gefragt, beim Einsatz im Lager oder in der Produktion eher Kraft und Belastbarkeit, also die Fähigkeit, bestimmte Bewegungen viele Male hintereinander ausführen zu können. „Wir kombinieren schon bestehende Bewegungsmetriken mit unseren neuen taktilen Metriken und geben so erstmals einen Überblick über die Gesamtheit der Grundfähigkeiten für physische Interaktion eines robotischen Systems“, erläutert Kirschner. www.tum.de