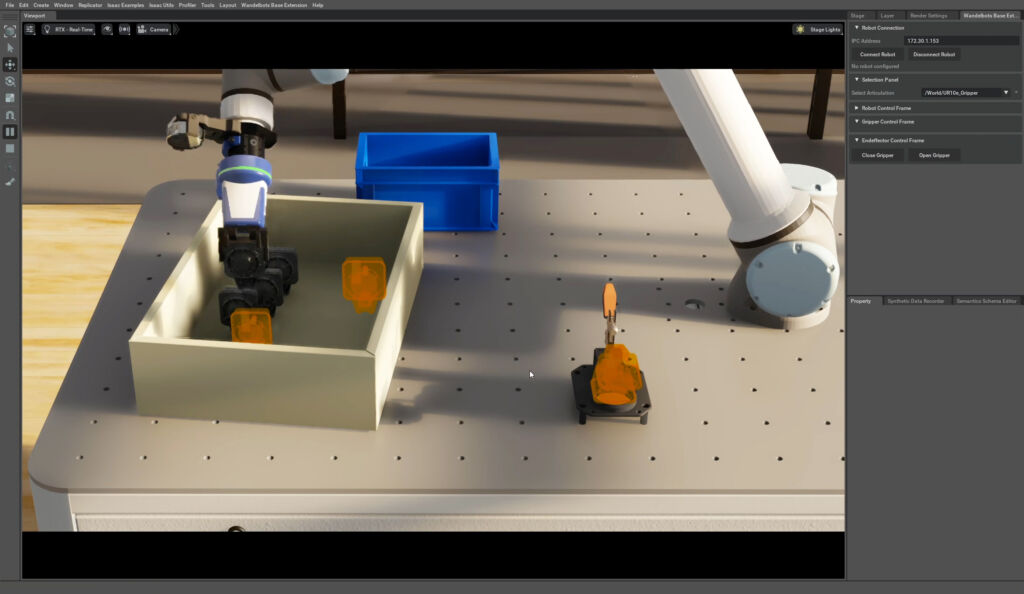
Volkswagen nutzt die Wandelbots-Software Nova zur virtuellen Planung und Simulation mit dynamischem Roboterpfad in Nvidia Omniverse. Die Pick&Place-Anwendung ist Teil des Montageprozesses zur Installation eines Signalhorns im Elektrofahrzeug. Der mechanische Greifer nimmt das Signalhorn aus einer Box auf, wobei die Abholpunkte variieren. Die unterschiedliche Position und Ausrichtung der Teile wird durch ein 3D-Vision-System erkannt und an das Roboterprogramm übermittelt, sodass der Greifer die Signalhörner für die Weiterverarbeitung platziert. Novas Bibliotheken bieten realistische 3D-Modelle von Roboterarmen und Peripheriegeräten, so dass digitale Zwillinge und Zellkonfigurationen vorab erstellt werden können. Nova gewährleistet einen durchgängigen Datenfluss von der virtuellen Umgebung bis zur realen Roboterzelle, indem es die Szenenerstellung und Konfiguration in der digitalen Trainingsumgebung von Nvidia Omniverse vereinfacht.