Aktuell kann festgestellt werden, dass die Kosten für Initial-, Neu- und Anpassungsprogrammierung von Robotern einen Großteil der Gesamtkosten dieser Systeme ausmachen. Über die Lebenszeit einer Industrieroboteranlage entfallen im Durchschnitt 75 Prozent der Kosten auf Programmiertätigkeiten. Das heißt für eine Industrieroboteranlage im Wert von 250.000€ entstehen weitere 750.000€ Kosten durch deren flexible Verwendung. Das liegt daran, dass es keine Möglichkeit gibt, Industrieroboter schnell und kostengünstig auf neue Aufgabenstellungen anzupassen. Programmiertätigkeiten für Industrieroboter sind, Stand heute, eine manuelle Tätigkeit, unabhängig davon, ob direkt an der Roboteranlage oder computergestützt. Die steigenden Lohnkosten und die wachsende Komplexität der Anwendungsszenarien treiben die Programmierkosten für Roboteranwendungen überproportional in die Höhe. In der Folge ist die dringend benötigte Automation mit Industrierobotern für viele Unternehmen unwirtschaftlich.
Anwendungsnahe Grundlagenforschung
Seit 2020 entwickelte das Team von Byte Robotics an der Universität Magdeburg eine Softwarelösung, die es ermöglicht, die notwendigen Zeitaufwände zur Roboterprogrammierung um bis zu 75 Prozent zu reduzieren. In Einzelfällen kann die menschliche Programmierung sogar komplett entfallen. Die Lösung basiert auf der Automatisierung der manuellen Programmierprozesse in sogenannten Offline-Programmierumgebungen, mit denen aktuell Industrieroboter computergestützt, manuell programmiert werden. Innerhalb dieser Softwareumgebungen sind alle Daten vorhanden, die eine automatische Programmierung ermöglichen. Hierfür werden selbst entwickelte, autonome Pfadplanungsalgorithmen verwendet, die dem Feld der künstlichen Intelligenz zugeordnet werden können.
Für die automatische Programmierung werden Optimierungskriterien benötigt. Aktuell ist das die Zykluszeit der Roboteraufgabe. Das bedeutet, dass die Roboterprogramme während der Erzeugung gegen eine möglichst geringe Abarbeitungszeit konvergieren. Die Roboterprogramme werden Zykluszeit-optimal. Andere Optimierungskriterien sind ebenfalls möglich, wie z.B. geringer Energieverbrauch oder geringer Verschleiß. Diese sind zurzeit jedoch noch selten angefragt.
Zusammengefasst treten durch die Verwendung folgende Effekte ein:
- Der Zeitaufwand für die Erstellung von Industrieroboterprogrammen wird drastisch reduziert
- Die Effizienz und Rentabilitität der Roboteranlage steigt
Es ist an dieser Stelle wichtig festzuhalten, dass der Fokus der Programmerstellung die Bewegungsprogrammierung ist. Signalverschaltung, Anlagenlayout, Anlagenlogik werden und sollen von Anlagenplaner:in bzw. Roboterprogrammierer:in vorgegeben werden. Der Mensch ist das Zentrum des Anlagendesignprozesses.
Ansatz der Integration
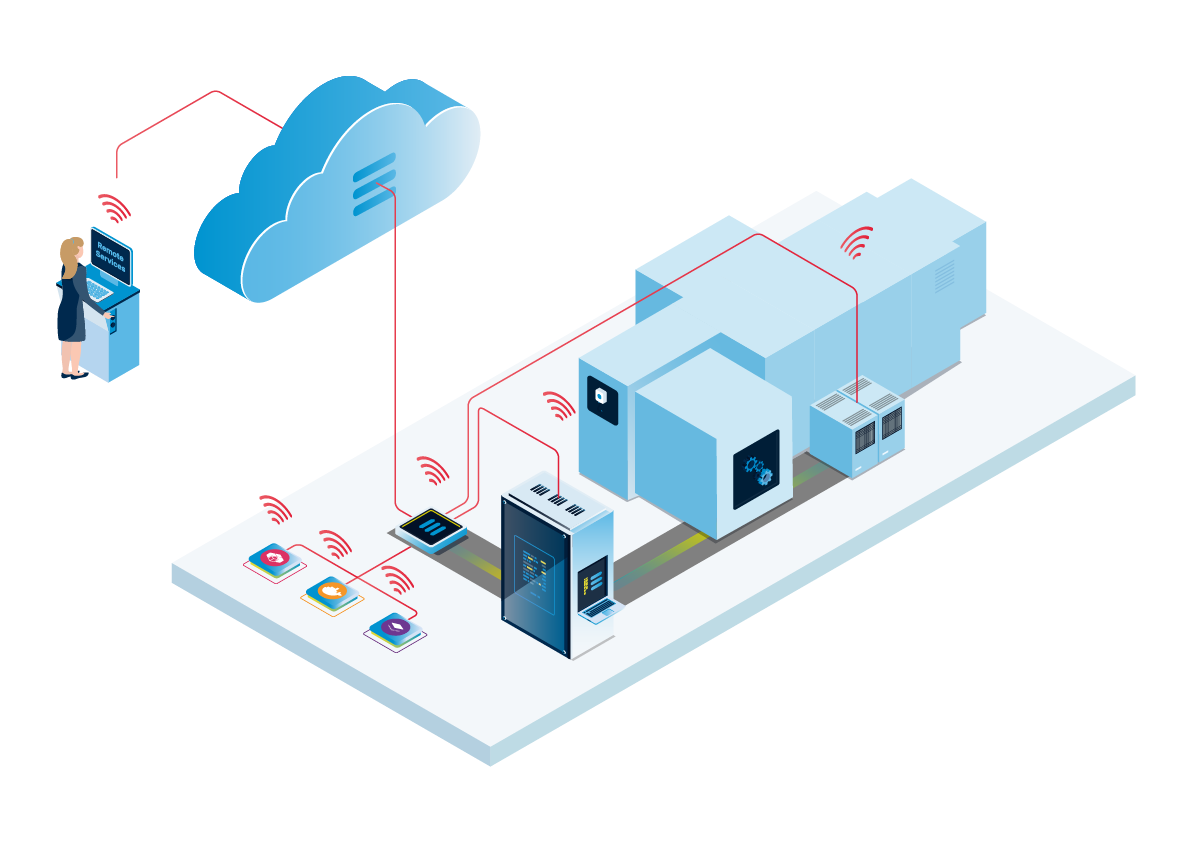
Byte Robotics verfolgt einen Ansatz der Integration, um Funktionen verfügbar zu machen. Innerhalb bereits existierender und genutzter Offline-Programmierumgebungen wird die Lösung eingebettet. Das ermöglicht es, Programmierer:innen bei ihrer aktuellen Arbeit zeitnah zu unterstützen, ohne eine neue Softwareumgebung erlernen zu müssen oder die vorhandenen Workflows umzulernen. Das dies möglich ist, hat das Unternehmen bereits für drei Programmierumgebungen nachgewiesen (Artiminds RPS, Kuka.Sim, Visual Components).
Innerhalb dieser Programmierumgebungen wird, nach der ohnehin notwendigen Aufgabenbeschreibung für den Industrieroboter, die automatische Programmerzeugung gestartet. Innerhalb von Minuten wird ein kollisionsfreies, taktzeitoptimales Roboterprogramm generiert, das mit den bekannten Softwarewerkzeugen der Programmierer:innen weiterverwendet werden kann.
Bloßes Imitieren von Prozesswissen
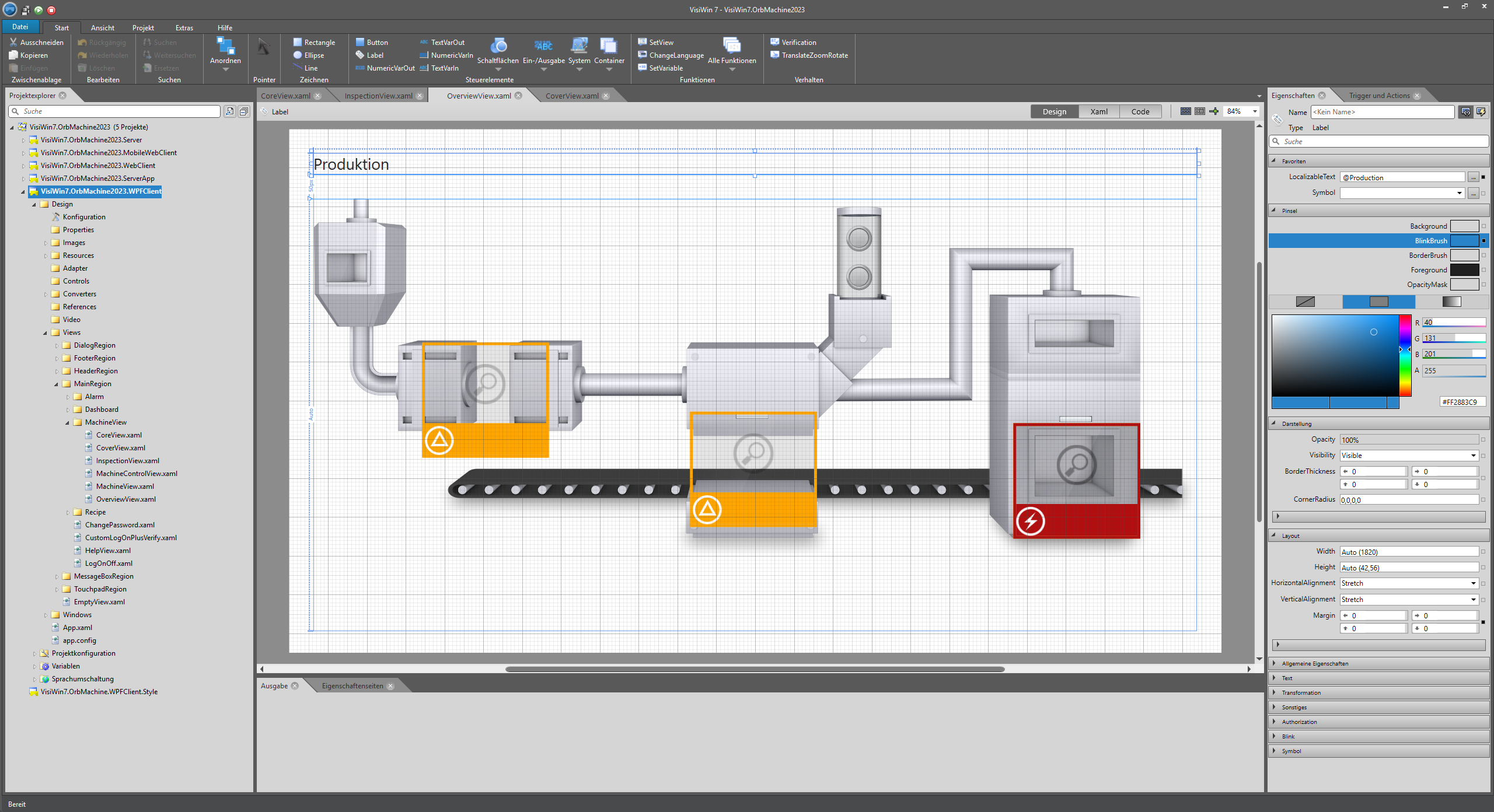
Aktuelle Offline-Programmierumgebungen bieten Roboterprogrammierer:innen die Möglichkeit, Industrieroboter in einer 3D-Simulation manuell zu programmieren. Das Werbeversprechen der automatisierten Erzeugung von Roboterbewegungen beschränkt sich hier auf das Imitieren von Prozesswissen zur Erzeugung von Prozesspfaden an 3D-Werkstücken. Das kann z.B. das Anlegen einer Schweißnaht an einer Innenkante oder eine Sprühpfad für eine Oberfläche sein. Prozesswissen, das jeder Facharbeiter in einem Fertigungsbetrieb detailliert erklären kann. Einzelne wenige OLPs bieten kollisionsfreie Pfaderzeugung zwischen zwei vorgegebenen Positionen der Roboter an, die jedoch technologisch, als auch funktional, deutlich von einer automatischen, taktzeitoptimalen Programmerzeugung zu unterscheiden sind.