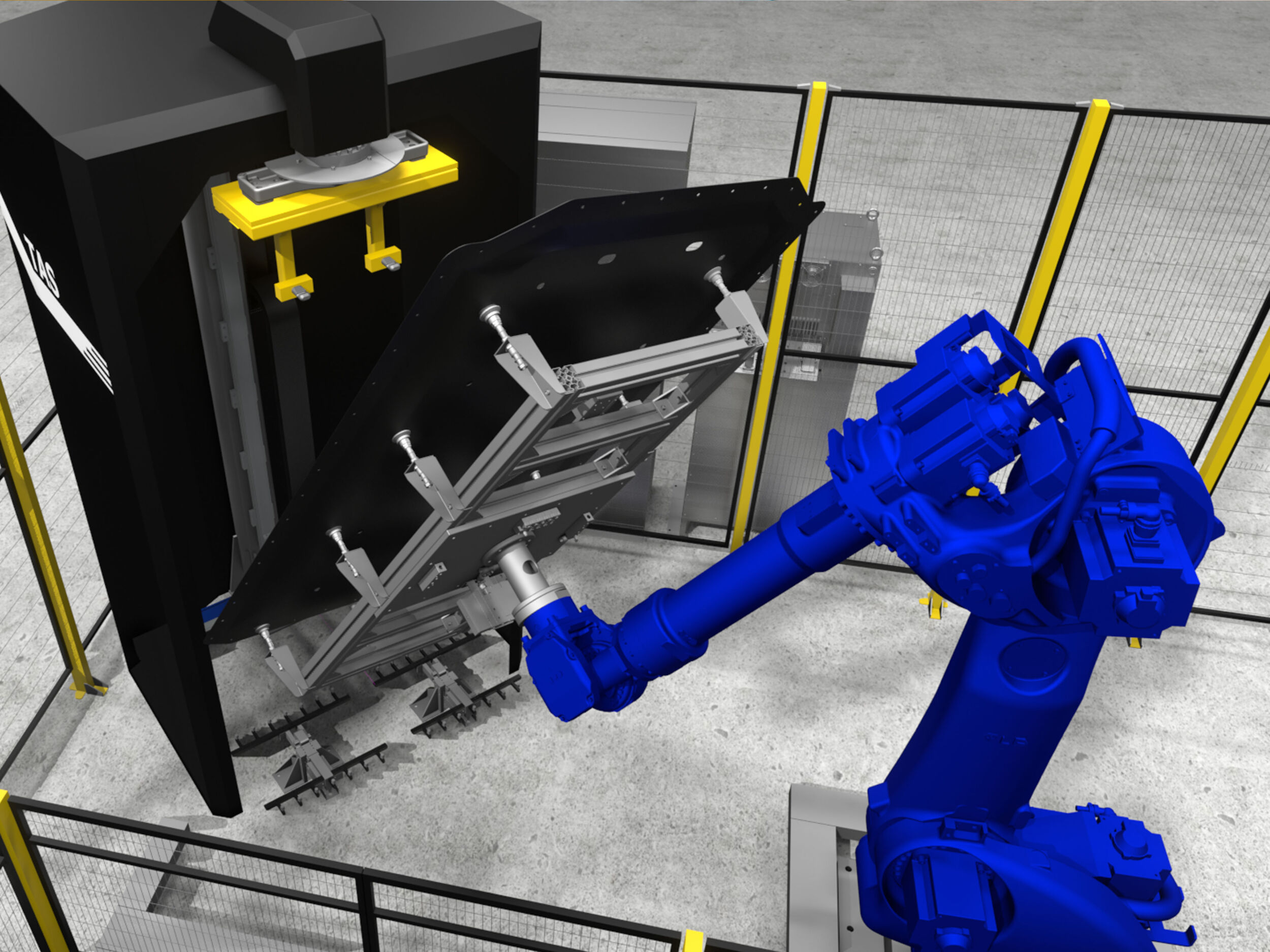
Künstliche Intelligenz optimiert kamera-geführte Robotik, indem sie die Implementierung einfacher, schneller und prozesssicherer macht. Traditionell erforderte die Machine Vision Software aufwändige Parametrisierung und Anpassung an sich ändernde Bedingungen. Moderne, auf neuronalen Netzen basierende Software automatisiert diesen Lernprozess und passt sich kontinuierlich an, was Präzision und Output steigert. Ein Praxisbeispiel zeigt, wie die Umrüstung einer Schweißanlage mit KI-basierter Software die Effizienz um über 10% erhöhte. Die Software verbessert die Erkennungsrate und reduziert Fehlgriffe, während der Wartungsaufwand sinkt. Aktive 3D-Sensoren, unterstützt durch KI, sind zudem robuster gegenüber äußeren Einflüssen, was den Durchsatz in zeitzyklus-kritischen Anwendungen verbessert.
placeholder
Weil parametrisierte 3D-Systeme ohne KI viel größere Datenmengen zur Laufzeit verarbeiten müssen als 2D-Systeme, dauert die Auswertung tendenziell länger, wodurch das System den Greifpunkt nicht schnell genug an den Roboter melden kann. Die künstliche Intelligenz verlagert jetzt aber die rechenintensiven Workloads in den Trainingsprozess. Dadurch kann das System die Teile zur Laufzeit viel schneller erkennen und die Zykluszeit einhalten.
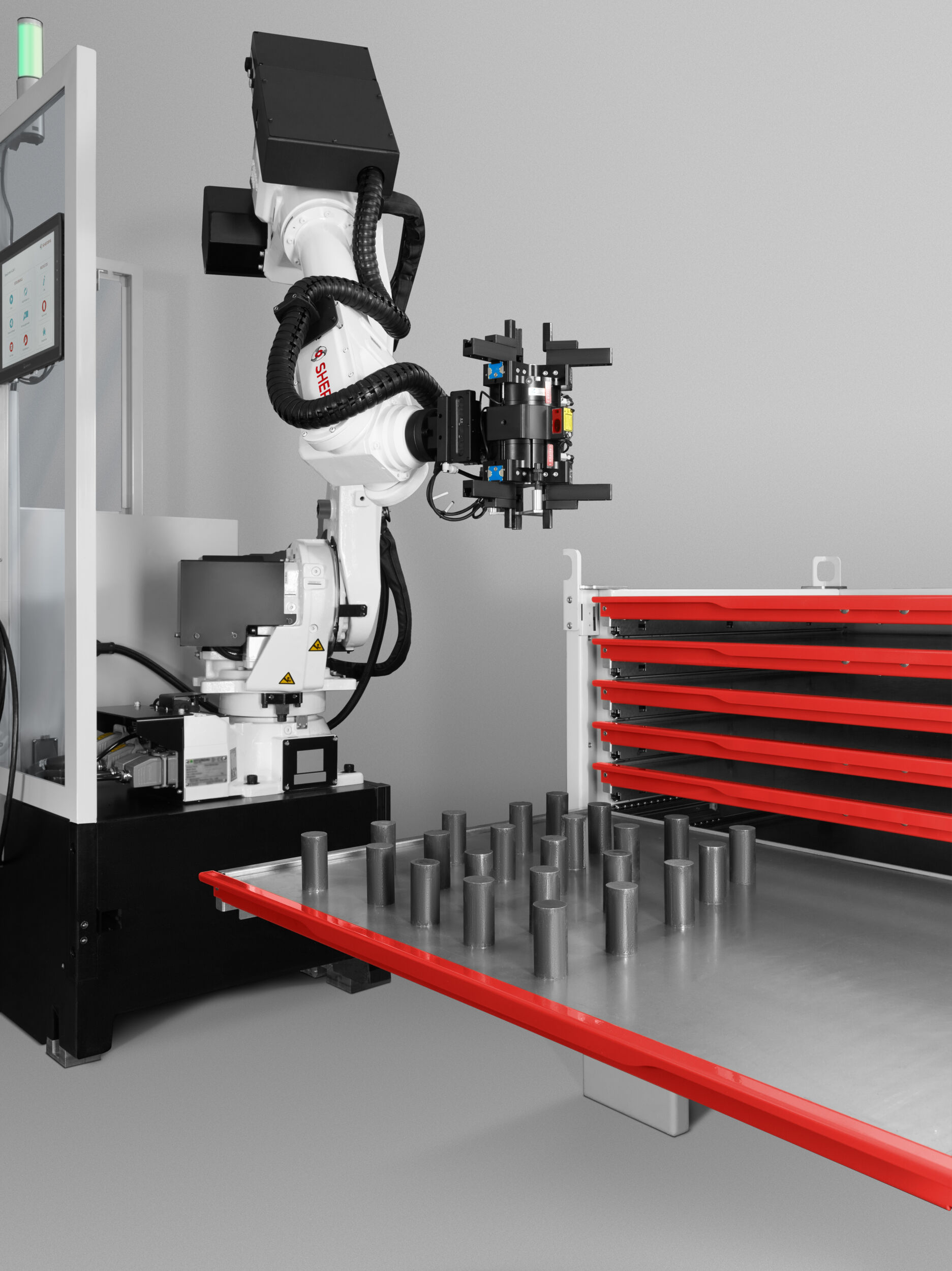
Sherpa Robotics plant, ein vollautomatisiertes, KI-gestütztes Kamerasystem für die Beladung von CNC-Maschinen in der Metall- und Kunststoffbearbeitung zu entwickeln.
Die Elektromobilität erfordert innovative und automatisierte Fertigungstechnologien, insbesondere bei der Herstellung von leistungsfähigen Hairpin-Statoren für Elektromotoren. Ein zentrales und sicherheitskritisches Qualitätsmerkmal ist…
Für durchgängig automatisierte Pick&Place-Tätigkeiten ist es wichtig, dass Roboter auch unterschiedlich geformte und durchscheinende Objekte sicher greifen können. Deep-Learning-Methoden in einer leistungsfähigen…
Für die maritime Industrie ermöglicht das Wire and Arc Additive Manufacturing-Verfahren (Waam) die schnelle und kostengünstige Herstellung maßgeschneiderter Komponenten wie Propeller, Türrahmen…
Mit dem aktuellen Fortschrittsbericht ‚KI verantwortlich gestalten‘ möchte die Plattform Lernende Systeme einen Beitrag zum innovations- und gesellschaftspolitischen KI-Diskurs leisten und einen…
Der Fahrradhersteller Cube setzt beim Wiederanlaufschutz seiner automatisierten Fertigungsanlagen auf moderne Radarsensoren. So etwa am Standort Waldershof, wo diese Technik den Betrieb…
Die Glasindustrie steht unter wachsendem Transformationsdruck. Steigende Energiekosten, volatile Märkte und ambitionierte Klimaziele erfordern neue technologische Ansätze. Hybridbeheizte Glasschmelzwannen, die Brennstoffe wie…
Störungen im Netzwerk kosten Zeit, Geld und Nerven. Abhilfe kommt in Form von selbstheilenden Netzwerken, die unter anderem mit künstlicher Intelligenz Fehler…
Laut einer Bitkom-Prognose werden die Ausgaben für IT-Sicherheit 2025 voraussichtlich um 10,1% auf 11,1Mrd.€ zulegen, nachdem 2024 mit 10,1Mrd.€ erstmals die 10-Milliarden-Euro-Marke…
Das Whitepaper gibt einen Überblick darüber, was unter Rauheit zu verstehen ist und warum dieser Aspekt bei der Oberflächenbewertung eine zentrale Rolle…
Mit dem neuen Buch ‚Wirtschaftswende jetzt! – So bringen wir Deutschland wieder auf Wachstumskurs‘ bietet Interim Manager Eckhart Hilgenstock gemeinsam mit führenden…