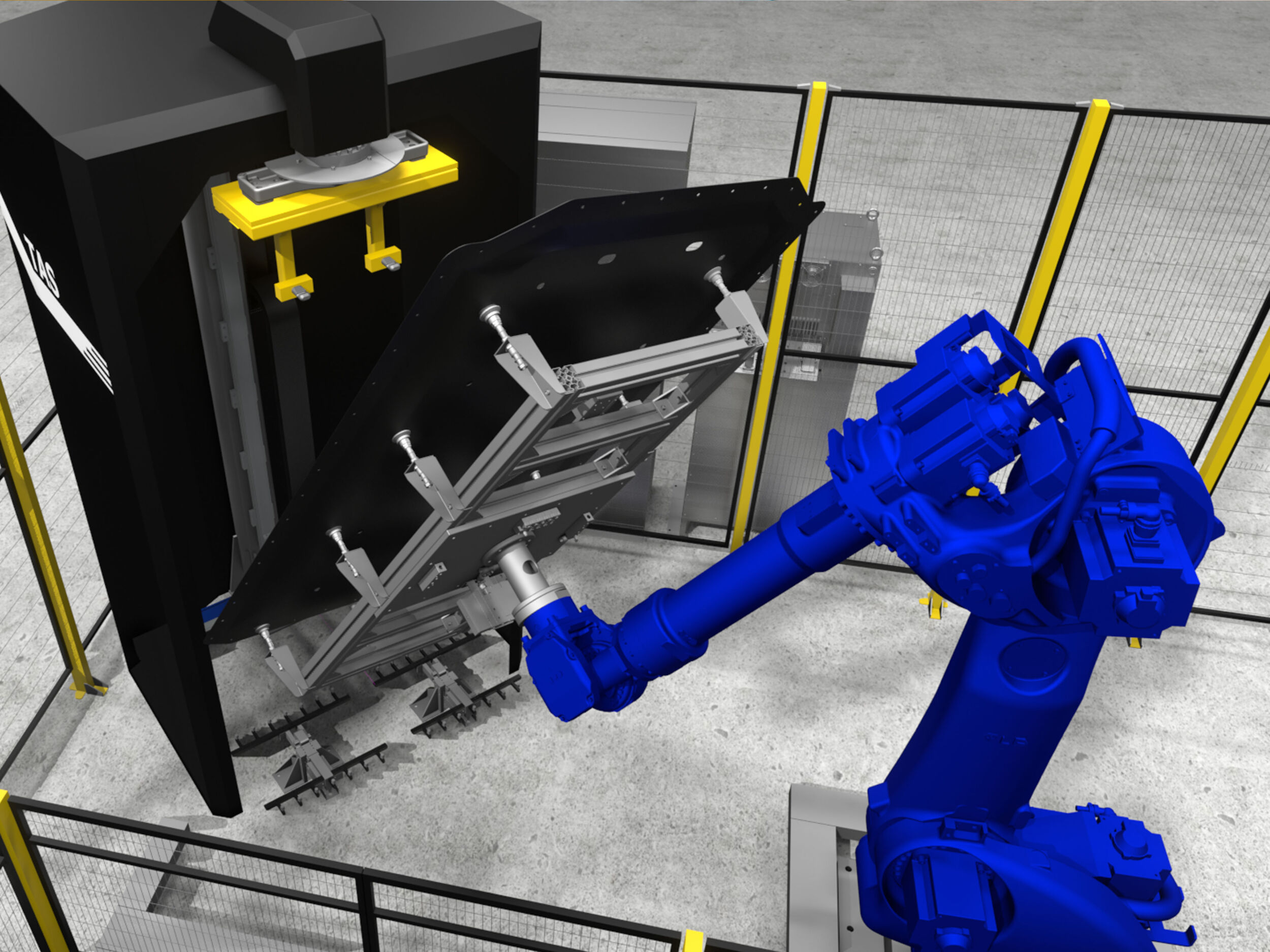
Das Ergebnis ist ein System, das die Unterwasser-Prüfung von Teilen mit einem Durchmesser von bis zu 250cm und einem Gewicht von mehr als einer Tonne ermöglicht. „Wenn sich der Drehtisch hebt und senkt, synchronisieren softwarebasierte Getriebefunktionen aus den Twincat-Bibliotheken die Motoren perfekt“, sagt Grant. „Wenn sich der Drehtisch dem Boden des Tanks nähert, schaltet das Servosystem vom positionsbasierten Modus zu einem drehmomentbasierten um. Indem wir die Motoren auf ein bestimmtes Drehmoment einstellen, schieben wir den Rahmen in den Boden des Tanks und stoßen auf harte Keilanschläge, die ihn an Ort und Stelle fixieren. Auf diese Weise bleiben selbst riesige Teile stabil, wenn sie sich mit 30U/min drehen.“
Zwei zweikanalige Servoverstärker AX5206 treiben die vier Motoren an. Mit Twinsafe integrieren sie auch funktionale Sicherheit direkt in die Antriebskomponenten. Durch die Kommunikation über Safety-over-Ethercat werden die antriebsrelevanten Sicherheitsfunktionen STO, SS1 und SS2 unterstützt. Die Echtzeitkommunikation ermöglicht die präzise Synchronisation der Bewegungsachsen. Darüber hinaus trug die Kombination von Energieversorgung und Kommunikation über die One Cable Technology dazu bei, den Zeit- und Kostenaufwand für die Verdrahtung des über 36m langen Systems zu reduzieren. Der Einsatz von Ethercat beseitigte auch jegliche Kommunikationsbarrieren mit den Robotern und ermöglicht den Wechsel verschiedener End-of-Arm-Werkzeuge.
Leistungsschub durch Integration
Innerspec konnte die technischen Anforderungen seines Großkunden aus der Luft- und Raumfahrt erfüllen. Das NDT-System Twin Robotic bietet ausreichend Flexibilität, um auch in Zukunft neue Teile oder Prozesse zu unterstützen. So kann Grant z.B. benutzerdefinierten C++-Code schreiben und ihn über eine Twincat-Funktion bereitstellen, anstatt die Basisfunktionalität der Robotersteuerungen zur Ansteuerung der Werkzeuge zu verwenden: „Mit dem Fast-Send-Treiber von Kuka kann man bis zu 1ms pro Update erreichen, aber mit unseren Software-Algorithmen, die im C++-Modul in Twincat implementiert sind, schaffen wir das in etwa 100µs. Wir können also Instrumente im Grunde zehnmal schneller auslösen als zuvor, was die Prüfgeschwindigkeit und -genauigkeit drastisch erhöht.“