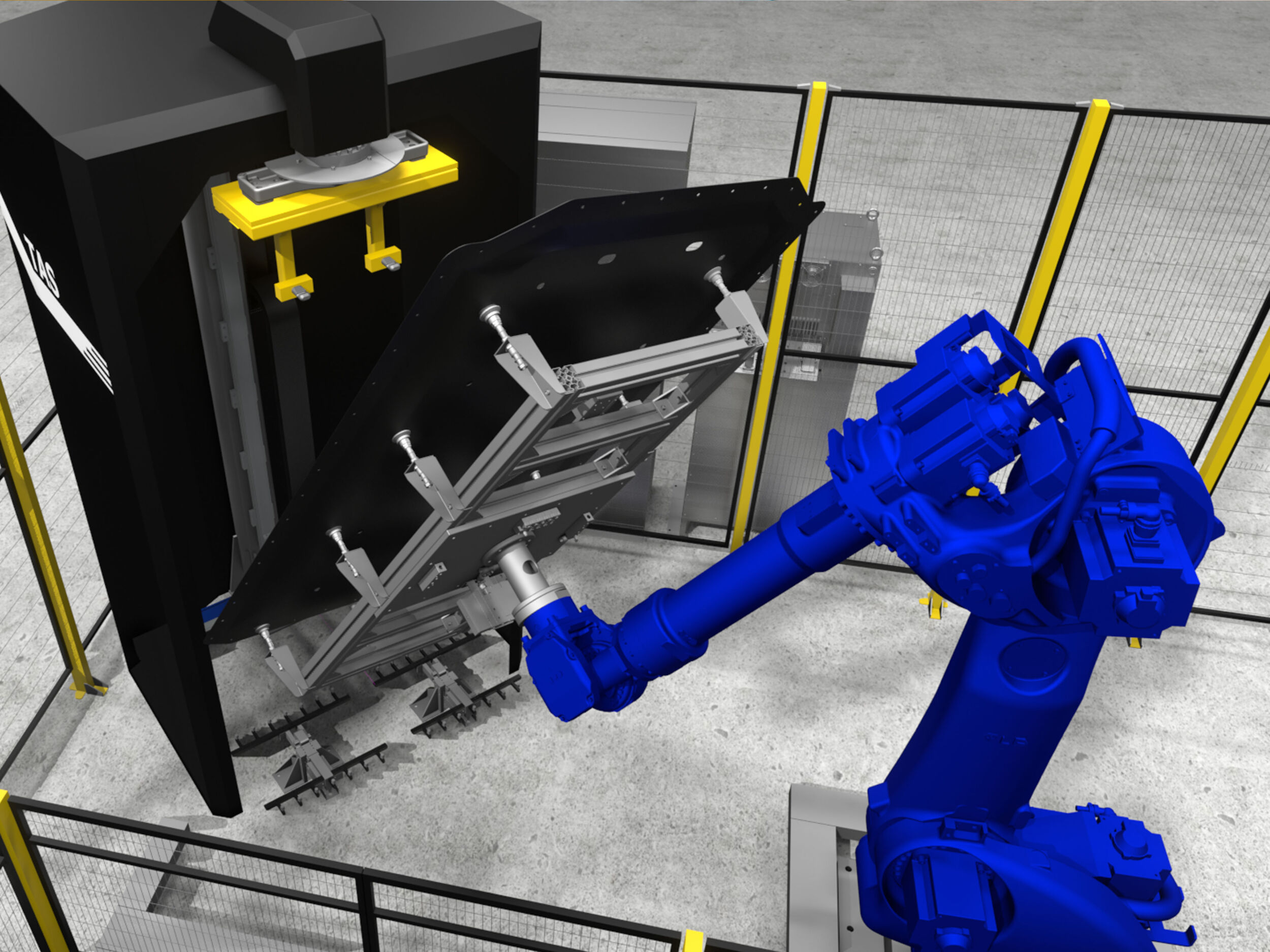
Bei vielen Applikationen wie dem Griff-in-die-Kiste, dem Kitting und dem Depalettieren kommt es stark auf die Genauigkeit der Erkennung und die Erreichbarkeit der Bauteile an. Roboception setzt dabei seit Jahren auf das Training mittels synthetischer Daten basierend auf CAD-Modellen. Synthetische Bilder liefern die Variation und wahre Lage der Objekte, ohne dass eine manuelle Lageschätzung oder ein Labeln der Daten erforderlich ist. Dabei werden sowohl Bild- als auch Tiefendaten verwendet, um hohe Genauigkeiten zu erreichen. Dieser Ansatz ist bereits erfolgreich im Markt eingeführt. Die Erstellung der KI-Modelle (Templates) wird auf Basis des Kundenfeedbacks kontinuierlich weiterentwickelt und ist mittlerweile vollautomatisiert.
Templateerstellung als Cloud Service
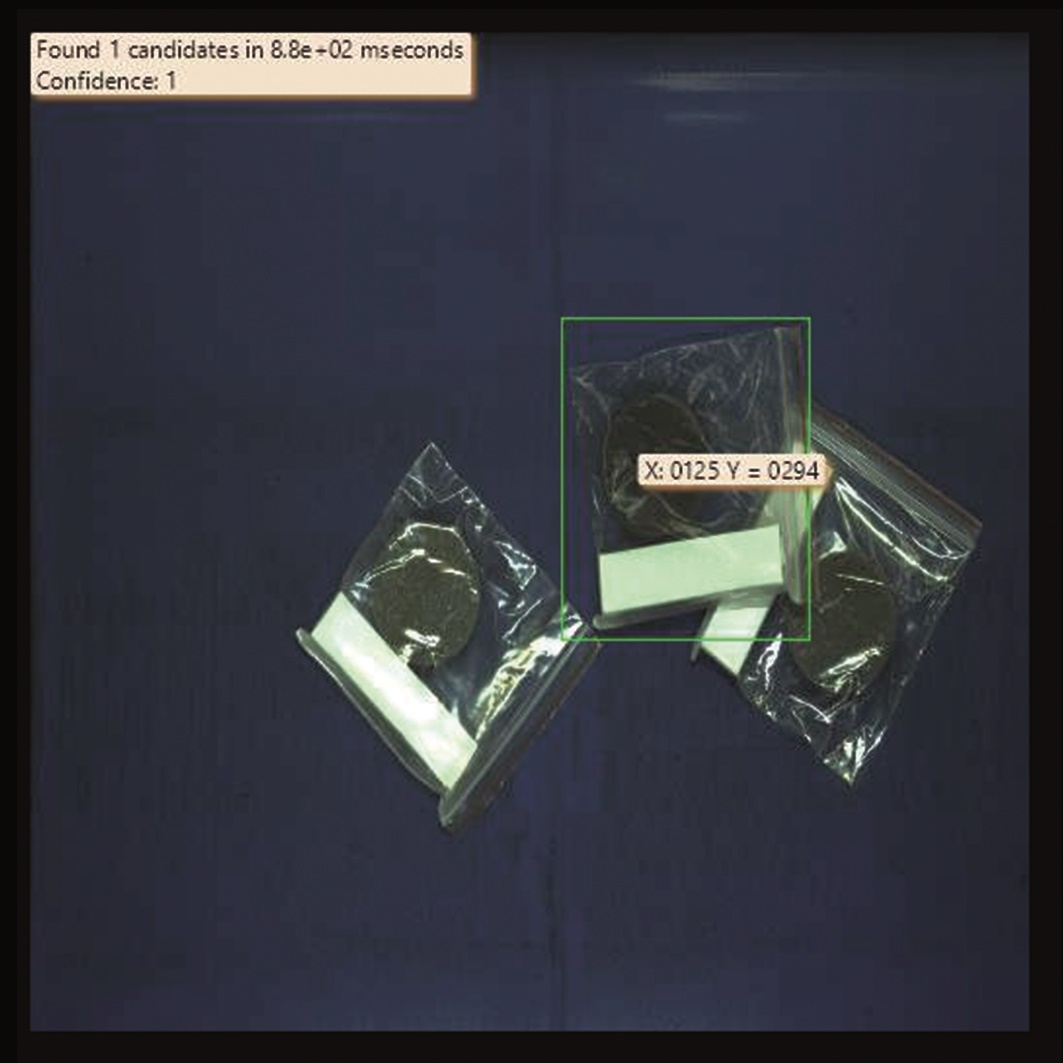
Die Lageschätzung der Objekte ist als Pipeline gestaltet. Im ersten Schritt wird ein umgebendes Rechteck geschätzt. Danach folgt ein initialer Lageschätzer, dessen Ergebnis klassisch auf Basis der Punktwolke und der Bilddaten verfeinert wird. Durch diese Aufteilung in Einzelschritte können Elemente unabhängig optimiert werden, was Trainingszeiten minimiert und auch Anpassungen ohne komplettes Re-Training ermöglicht. In der Vergangenheit hat sich jedoch gezeigt, dass CAD-Modelle oft nicht die tatsächliche Erscheinung des Objekts wiedergeben, so dass in diesen Fällen reale Daten benötigt wurden. Diese Erfahrungen haben die Entwicklung neuer KI-Modelle für die initiale Lageschätzung angetrieben. Damit sind nun wesentlich weniger manuelle Interaktionen bei der Templateerzeugung erforderlich und die Abhängigkeit von realen Daten wurde deutlich reduziert. Somit besteht jetzt die Möglichkeit, die Erstellung der Templates als Cloud oder On-Premise Service für Kunden anzubieten.
Eine weiterer Vorteil des neuen Lageschätzers ist die Möglichkeit des Trainings von parametrisierbaren Modellen. Gerade bei einer hohen Anzahl von unterschiedlichen, aber dennoch ähnlichen Objekten wird damit die Anzahl der erforderlichen Templates reduziert. Dies ist insbesondere bei einer großen Vielfalt ähnlicher Objekte ein erheblicher Kostenvorteil.
Erreichbarkeit von Bauteilen
Gerade in Schüttgutszenen, in denen eine große Anzahl von Bauteilen detektiert werden kann, ist es wichtig, vor allem die Posen der aussichtsreichsten Objekte zu erhalten. Die neuen Templates liefern eine robuste Segmentierung der Objekte, was eine wichtige Voraussetzung für die Berechnung ihrer Erreichbarkeit ist. Diese wird dann zur Priorisierung für die weiteren Schritte genutzt. Somit werden aus der Vielzahl möglicher Objektposen nur diejenigen verfeinert, welche die größte Aussicht auf kollisionsfreie Greifposen bieten.
roboception.com