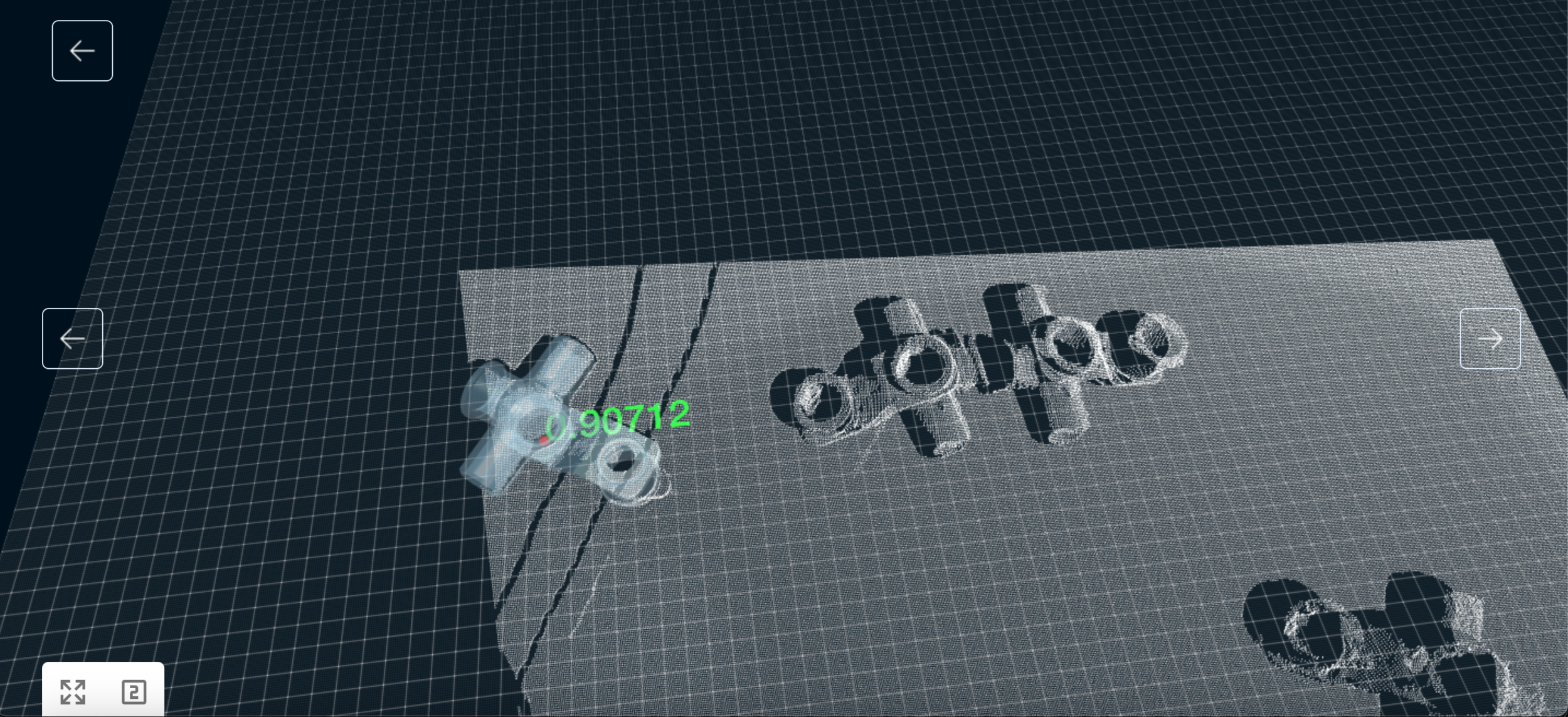
Beginnend mit einem Schnellscan mit 40 Bildern erfolgt eine erste grobe 3D-Rekonstrukion. Die Ansichtenplanung analysiert über den Prozess immer wieder die Punktdichte, zur Veranschaulichung werden dünn besetzte Bereiche rot und dichte Regionen blau markiert. Daraufhin werden neue Kamerapositionen geplant. Der Roboter scannt weiter, während fortlaufend die Rekonstrukion aktualisiert, sowie neue Kamerapositionen geplant werden. Dieser Prozess wiederholt sich, bis die gewünschte Oberflächendichte erreicht ist. Am Ende des Prozesses steht – ohne manuelle Nachbereitung – das finale 3D-Modell, das visualisiert und analysiert werden kann.
Thematik: 3D-Bildverarbeitung (3DB), Lösungen
Ausgabe: SPS-MAGAZIN NEWSLETTER DOSSIER Robotik 42 2025
Fraunhofer-Institut IGD