Sinnvolle Einsatzfelder für Humanoide sind wohl vor allem flexible Montagearbeiten oder Material-Handling. Perspektivisch ist auch ein Einsatz im Haushalt denkbar, während robotische Systeme in tierähnlicher Form, wie z.B. Roboterhunde, eher in der Feldanwendung genutzt werden, z.B. für Inspektionen, Tracking oder das Erfassen von Umgebungsdaten vor Ort. Dabei spielt aber weniger die Intelligenz die Hauptrolle, sondern vor allem die Tatsache, wie gut sich die Bewegungen in der Praxis umsetzen lassen.
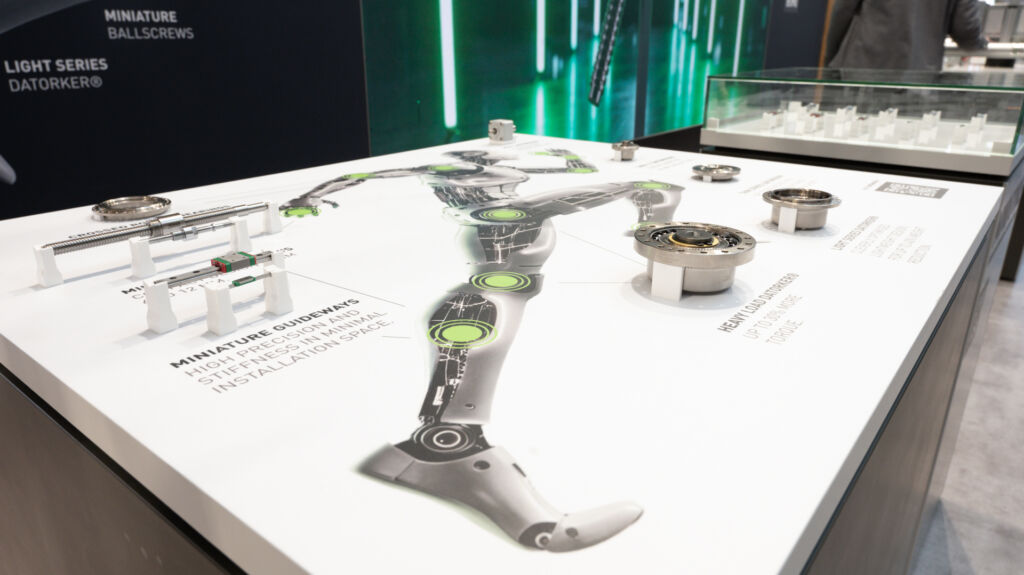
Auf der Hannover Messe wurde diese Perspektive auch im Gespräch zwischen Werner Mäurer, Geschäftsführer von Hiwin, und Frauke Itzerott, Chefredakteurin von ROBOTIK UND PRODUKTION, deutlich. „Die aktuelle Diskussion ist zwar stark KI-getrieben – dabei entscheidet sich die Einsatzfähigkeit humanoider Systeme in der Mechanik“, so Mäurer.
„Ein humanoider Roboter ist nur so gut wie seine Fähigkeit, Bewegung in der Realität umzusetzen – nicht wie seine theoretische Intelligenz“, betont Mäurer. Während Algorithmen und KI-Modelle in rasantem Tempo leistungsfähiger werden, stoßen humanoide Roboter im realen Einsatz weiterhin an grundlegende Grenzen, da die Antriebstechnik, die als Verbindung zwischen digitalem Modell und physischer Umsetzung dient, noch zu häufig unterschätzt wird. Doch die Anforderungen an die mechanische Auslegung sind hoch: Gefragt sind gleichzeitig Dynamik und Präzision, bei möglichst geringem Platzbedarf und Gewicht. Hinzu kommen steigende Erwartungen an Effizienz und Lebensdauer.
Schlüsselkomponenten für humanoide Bewegungen
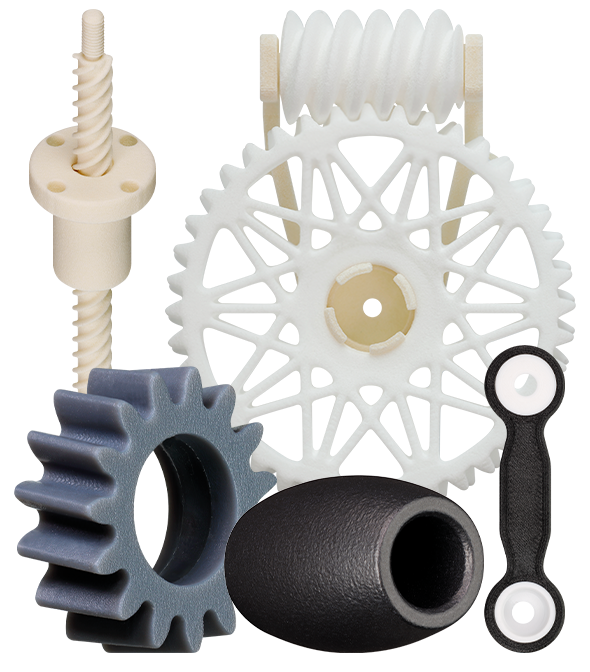
Im Mittelpunkt stehen präzise und zugleich kompakte Komponenten, wie sie Antriebshersteller wie Hiwin für anspruchsvolle Bewegungsaufgaben entwickeln. So übernehmen z.B. miniaturisierte Kugelgewindetriebe die Umwandlung von Dreh- in Linearbewegungen – z.B. in Fingern, feinen Gelenken oder Greifern. Entscheidend ist dabei nicht nur die geringe Baugröße, sondern vor allem eine hohe Zuverlässigkeit, Effizienz und Lebensdauer. Mithilfe angepasster Geometrien und präziser Fertigung können selbst kleine Bauteile große Kräfte übertragen.
Ergänzt wird dieses Zusammenspiel durch kompakte Profilschienenführungen, die dafür sorgen, dass Bewegungen auch unter Belastung präzise und stabil ausgeführt werden. Sie kommen überall dort zum Einsatz, wo Bauteile exakt geführt oder Kräfte zuverlässig aufgenommen werden müssen – wie in Arm- oder Beinsegmenten oder in Greifmechanismen.
Für Drehbewegungen, z.B. in Hand-, Hüft-, Arm- oder Kniegelenken, werden häufig kompakte Wellgetriebe eingesetzt – wie sie bei Hiwin unter der Marke Datorker angeboten werden. Sie ermöglichen es, hohe Drehmomente auf kleinem Bauraum zu realisieren und arbeiten dabei nahezu spielfrei. In Kombination mit Kreuzrollenlagern, die unterschiedliche Belastungen gleichzeitig aufnehmen können, entsteht ein besonders steifes und platzsparendes Gesamtsystem. „Die Herausforderung besteht darin, Genauigkeit und das Gewicht der Komponenten sinnvoll miteinander zu kombinieren“, erklärt Mäurer. Nur so können Systeme präzise und gleichzeitig energieeffizient arbeiten.
Vom Demonstrator zur industriellen Realität
Viele der heute gezeigten humanoiden Systeme befinden sich noch im Prototypenstadium. Für den Einsatz in der Industrie müssen sie jedoch deutlich mehr leisten: Sie sollen dauerhaft funktionieren, robust sein und sich wirtschaftlich produzieren lassen. „Entscheidend ist nicht die kurzfristige Demonstration, sondern die langfristige Zuverlässigkeit im Betrieb“, bringt es Mäurer auf den Punkt.
Ein wichtiger Schritt in diese Richtung ist die Modularisierung. Bislang sind viele Systeme stark individuell aufgebaut und nur schwer übertragbar. „Erst wenn sich Bewegungssysteme modular denken lassen, wird humanoide Robotik wirtschaftlich tragfähig“, so Mäurer. Gerade an dieser Schnittstelle begleitet Hiwin seine Kunden als Partner – vom Prototypenbau bis hin zur Serienproduktion. Ziel ist es, aus funktionsfähigen Demonstratoren robuste, wirtschaftlich tragfähige Systeme für den industriellen Einsatz zu entwickeln.
Gleichzeitig lohnt sich auch ein kritischer Blick auf die Orientierung am menschlichen Vorbild. „Der menschliche Körper ist kein Ingenieursprodukt, sondern ein evolutionärer Kompromiss. Für viele Anwendungen gibt es effizientere Lösungen.“ In der Praxis dürften daher hybride Ansätze an Bedeutung gewinnen – also Systeme, die sich teilweise am Menschen orientieren, aber in einzelnen Bereichen bewusst technisch optimiert sind.
Parallel zeigt sich ein klarer Trend zur stärkeren Integration von Systemen. Statt einzelner Komponenten rücken zunehmend komplette Funktionsmodule in den Fokus, die Mechanik, Antrieb und Sensorik vereinen. Das reduziert Schnittstellen, vereinfacht die Integration und verbessert die Gesamtleistung – ein Ansatz, der gerade bei komplexen humanoiden Systemen große Vorteile bringt.
Vor diesem Hintergrund positioniert sich Hiwin als Technologiepartner für zentrale Schlüsselkomponenten – von Linearführungen und Kugelgewindetrieben über Kreuzrollenlager bis hin zu Wellgetrieben. Sie bilden die Grundlage dafür, dass sich Modelle und Konzepte überhaupt zuverlässig in reale Bewegungsabläufe übertragen lassen. „Ohne leistungsfähige Bewegungssysteme bleibt humanoide Robotik ein Demonstratorenthema. Die Industrialisierung beginnt im Detail der Mechanik“, fasst Mäurer zusammen. Und weiter: „Die Zukunft humanoider Systeme entscheidet sich nicht allein in der Software, sondern darin, Bewegung dauerhaft beherrschbar zu machen.“ Damit wird deutlich: Die eigentliche Herausforderung humanoider Robotik liegt weniger in der künstlichen Intelligenz als in der Qualität der Bewegung. Engineering Motion wird so zum entscheidenden Faktor auf dem Weg von der Idee in die industrielle Praxis.