Die Integration von Robotern in bestehende Produktionslinien ist häufig komplex, teuer und mit technischen Hürden verbunden. Neben dem benötigten Platz müssen sich die Systeme nahtlos in die Fertigungsumgebung einfügen – allerdings lassen sich herstellerspezifische Robotersteuerungen nur schwer mit den Maschinensteuerungen koppeln. Zwar erlauben Schnittstellen die Programmierung von Bewegungen und Prozessen übergeordneter Steuerungen, doch bleibt die interne Bewegungslogik häufig inkonsistent und von außen nur schwer anzupassen. Externe Eingriffe, um Bewegungs- und Prozessabläufe zu verbessern, sind deshalb nur eingeschränkt möglich.
„Genau hier setzen wir an“, sagt Hartmut Ilch, Geschäftsführer bei Autonox Robotics. Unter dem Motto ‚Bessere Robotik in Komponenten‘ bietet das Unternehmen aus dem baden-württembergischen Willstätt steuerungsunabhängige Robotermechaniken, die sich flexibel an die Produktionsumgebung anpassen – nicht umgekehrt. Da Steuerungsschnittstellen entfallen, verschmelzen Roboter und Maschine zu einer Einheit.
Offene Lösung
Autonox liefert die Mechaniken als Automatisierungskomponente. Antriebstechnik, Steuerungen und Software gehören nicht zum Lieferumfang. Die Auswahl an verfügbaren Robotermechaniken umfasst u.a. schwere Knickarmroboter bis hin zu ultraschnellen Deltakinematiken – jeweils mit unterschiedlichen Traglasten, Freiheitsgraden und Ausführungen, z.B. für das Palettieren, Stahlfräsen oder die hygienische Verarbeitung von Lebensmitteln.
Aus den zahlreichen Robotermechaniken und den verschiedenen Antriebs- und Steuerungskomponenten der großen Automatisierer kann sich ein Maschinenbauer die passende Lösung zusammensetzen und erhält damit im Vergleich zu einer in sich geschlossenen Standardlösung eine deutlich bessere Robotik. „Anwender profitieren damit von einem hochintegrierten, autonomen System mit nur einer Steuerung, das selbst komplexe Aufgaben zuverlässig ausführt“, beschreibt Clemens Ratajczak, Betriebsleiter bei Autonox. „Da sind wir den großen Robotikherstellern mit ihren standardisierten Steuerungen und Lösungen einen Schritt voraus.“ Diese lassen sich oft nicht so einfach mit den Steuerungen von Maschinen verbinden. Autonox kann als kleines, agiles Unternehmen mit seinem umfangreichen Portfolio an steuerungsunabhängigen Mechaniken sehr spezifisch auf die jeweiligen Aufgaben der Kunden eingehen.

Roboterlösung für die Biegeautomatisierung
In enger Entwicklungspartnerschaft mit Trumpf hat Autonox eine präzise, auf den Kunden zugeschnittene Robotikmechaniklösung für die Biegeautomatisierung TruBend Cell 7000 realisiert, die hoch autonom und sehr produktiv Kleinteile produziert. „Ziel war bestmögliche Produktivität bei einer sehr hohen Genauigkeit“, sagt Ratajczak. Die Herausforderungen: exakte Positionierung der Kinematik, präzise Spezifikation der Robotergeometrie hinsichtlich des Bauraums und der Reichweite sowie eine besonders robuste Handachse. „Wir lieferten je einen prozessspezifisch ausgelegten Knickarm- und einen Scara-Roboter. Aufgrund der Genauigkeitsanforderungen ist jede Knickarmmechanik geometrisch vermessen. Dazu kommt eine stabile Handachse, da der Prozess Robustheit erfordert.“
Die Kunden profitieren von einer vollständig angepassten Lösung: einheitliche Hardware für Maschine und Roboter, eine Bedienoberfläche und nahtlose Integration in die bestehende Steuerung. Die sehr gute Zusammenarbeit war ein wesentlicher Erfolgsfaktor für die Entwicklung einer hochautonomen, produktiven und zugleich benutzerfreundlichen Lösung, die auf die Bedürfnisse der Anwender abgestimmt ist.

Mit Robotern Stahl fräsen
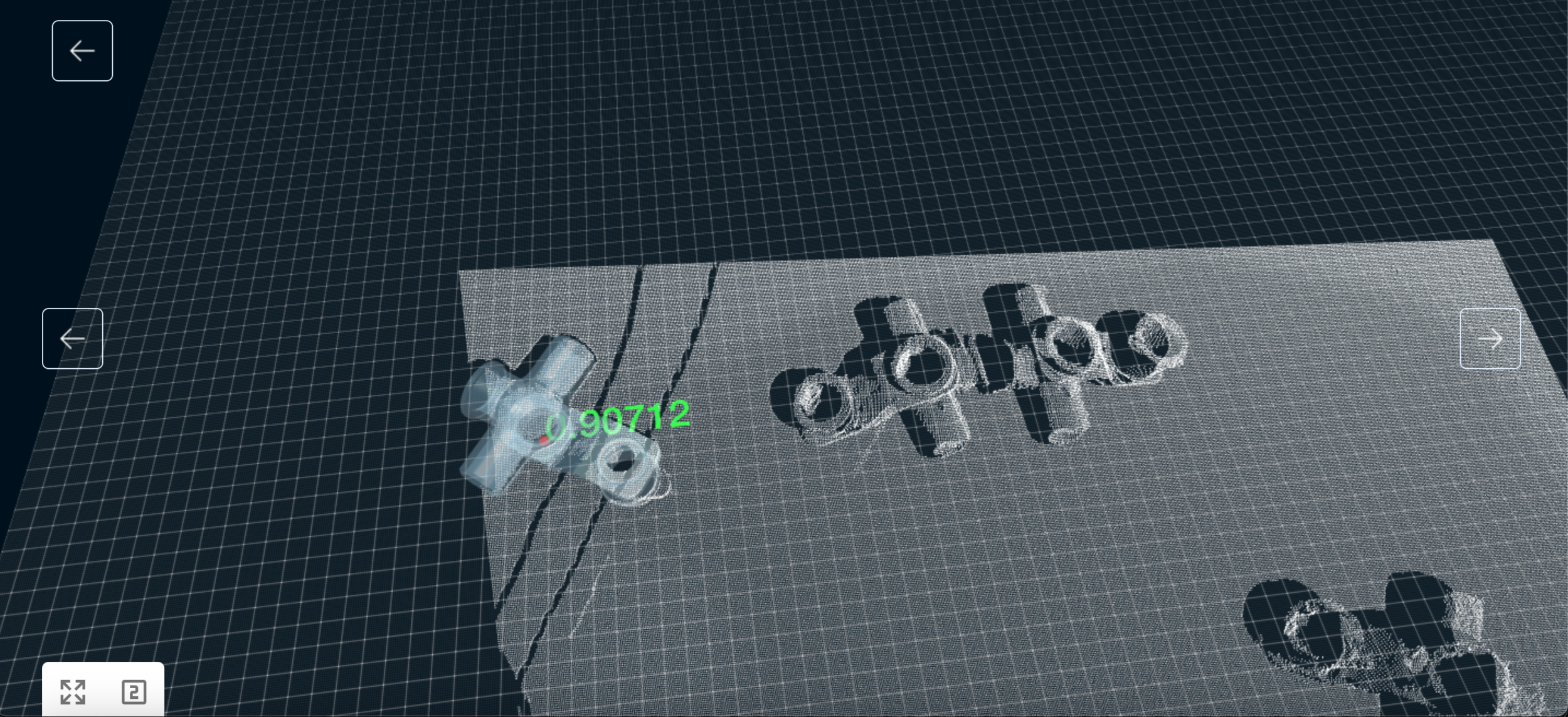
Lange galt es als unmöglich, mit einem Roboter vergüteten Stahl zu fräsen. „Auf der Automatica in München haben wir dazu eine neue Lösung gezeigt, mit der sich auch sehr große und lange Bauteile hochpräzise bearbeiten lassen – selbst in anspruchsvollen Branchen wie der Luft- und Raumfahrt“, berichtet Ilch. „Dazu haben wir unsere Robotermechaniken konsequent weiterentwickelt und eng mit Siemens und dem Fraunhofer IFAM in Stade zusammengearbeitet.“ Heraus kam eine hochsteife Robotermechanik mit äußerst präzisem Bewegungsverhalten. Damit eignet sich diese Lösung für Anwendungen mit hohen Bearbeitungskräften und großem Volumen.