Ein vom DFKI geleitetes Forschungskonsortium hat im BMWi-geförderten Projekt MARIO einen KI-gestützten Unterwasserschweißroboter entwickelt, der Schweißarbeiten in der maritimen Infrastruktur weitgehend autonom ausführen kann. Ziel ist es, professionelle Industrietaucher bei gefährlichen und körperlich belastenden Einsätzen zu entlasten und zugleich präzisere, gleichmäßigere Schweißnähte auch bei schlechter Sicht zu ermöglichen – vor allem, weil der Bedarf an Unterwasserschweißungen (z. B. an Häfen und Offshore-Strukturen) die Zahl verfügbarer Fachkräfte übersteigt. Kernkomponenten sind ein modularer Unterwasser-Manipulator mit zwei Metern Reichweite für Einsätze bis 6.000 Meter Tiefe sowie eine KI-basierte Schweißbahnplanung: Ein Stereokamerasystem am Brenner erfasst die Szene, KI-Modelle erkennen Schweißstöße samt Start- und Endpunkten und berechnen daraus die optimale Roboterbewegung. Beteiligte Partner sind u. a. TH Köln, Fraunhofer IGD sowie Industrieunternehmen.
* Diese Inhalte wurden mithilfe von Künstlicher Intelligenz erstellt und können Fehler enthalten.
placeholder
KI für maritime Instandhaltung
Schweißroboter schweißt
auch Unterwasser
Damit die maritime Infrastruktur nicht mehr nur ausschließlich von professionellen Industrietauchern instandgesetzt werden muss, hat ein Forschungskonsortium unter Leitung des Deutschen Forschungszentrums für Künstliche Intelligenz (DFKI) einen neuartigen Unterwasser-Schweißroboter entwickelt, der mit künstlicher Intelligenz (KI) und moderner Sensorik arbeitet.
Im vom Bundesministerium für Wirtschaft und Energie (BMWE) geförderten Projekt Mariow (Maritime AI-Guided & Remote Operated Welding) haben die Beteiligten ein robotisches System entwickelt, das Unterwasserschweißarbeiten weitgehend autonom ausführen kann. Einer Pressemitteilung des DFKI (Deutschen Forschungszentrums für Künstliche Intelligenz) zufolge soll es Taucherinnen und Taucher künftig bei körperlich belastenden und risikoreichen Tätigkeiten entlasten und gleichzeitig präzisere, gleichmäßigere Schweißnähte selbst unter schwierigen Sichtbedingungen anfertigen. In der Pressemitteilung wird darauf verwiesen, dass Unterwasserschweißungen wie Reparaturen von Hafenanlagen, Offshore-Strukturen und anderen metallischen Bauwerken bisher nur von Hand durchgeführt werden konnten. Der Bedarf übersteige jedoch die Zahl der verfügbaren Fachkräfte. Zum Projektkonsortium gehörten neben dem DFKI Robotics Innovation Center in Bremen das Institut für Material- und Prozesstechnik sowie das Labor für Autonome Systeme der TH Köln, das Fraunhofer-Institut für Graphische Datenverarbeitung IGD, die AMT GmbH und die Unterwasserkrause – Mutzeck GmbH.
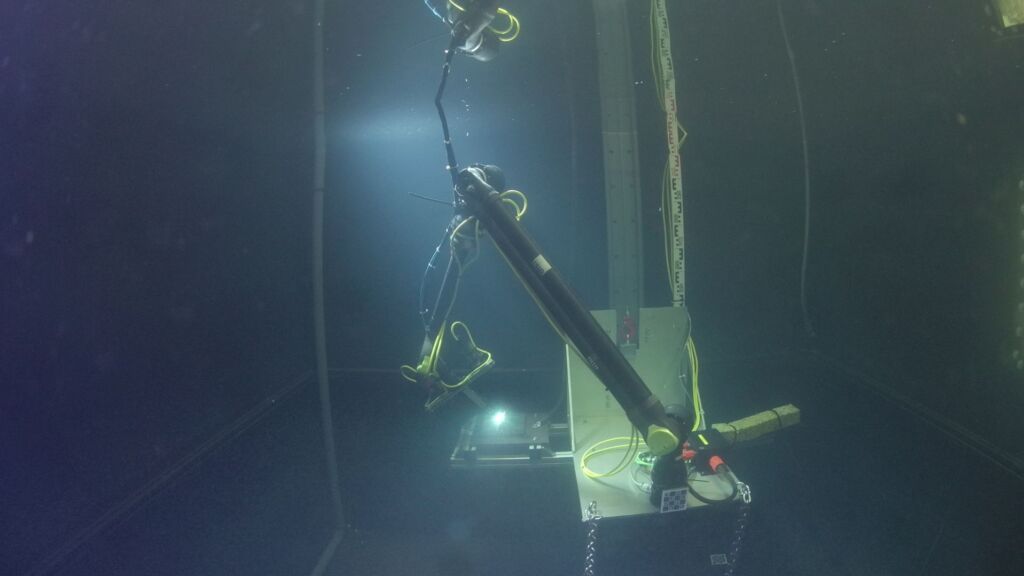
Der Roboter bei der autonomen Schweißung einer Kehlnaht im Schwarzen Testbecken.
– Bild: DFKI, Mariow Team
Modularer Unterwassermanipulator
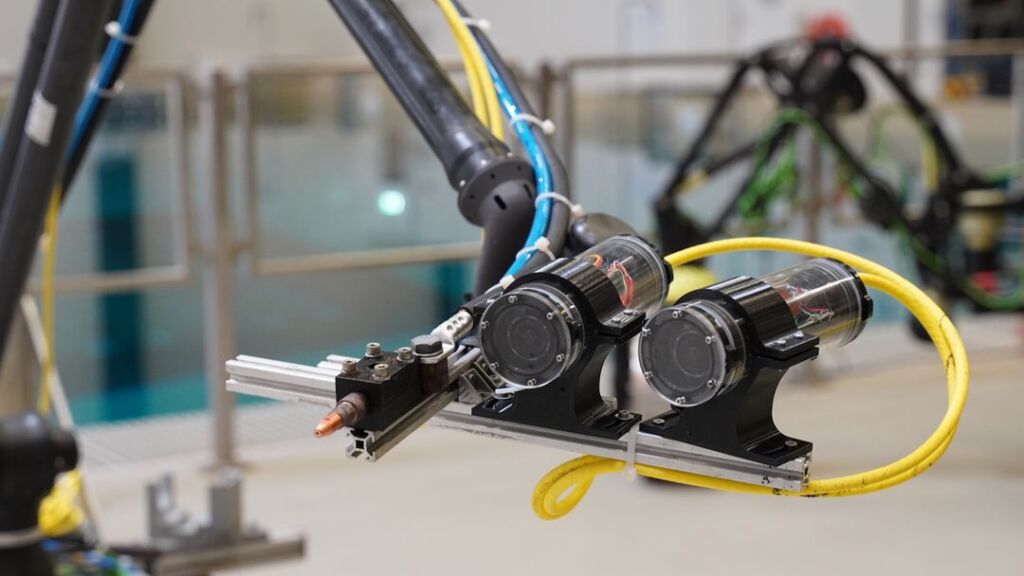
Als ein zentrales Element des Systems bezeichnen die Beteiligten einen am DFKI entwickelten modularen Unterwassermanipulator. Der Roboterarm ist bis zu einer Tiefe von 6.000 Metern einsetzbar, verfügt über eine Reichweite von zwei Metern und ist an unterschiedliche Einsatzszenarien flexibel anpassbar. Durch eine Kombination aus dezentraler Gelenkregelung und übergeordneter Bewegungsplanung kann der Manipulator Schweißarbeiten präzise und wiederholgenau ausführen.
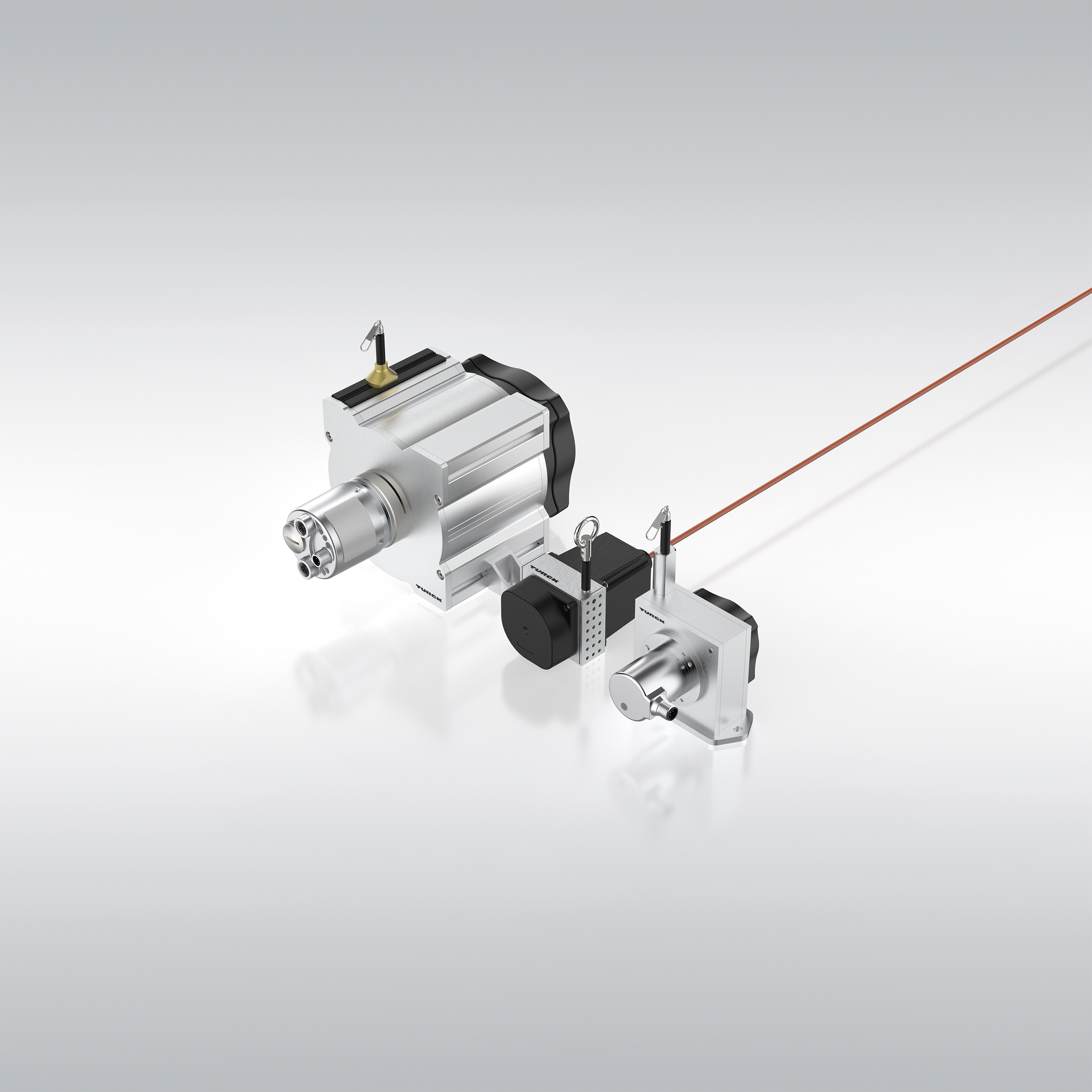
In der automatisierten Fertigung müssen Kabelschutzschläuche von Maschinen, Bearbeitungszentren und CNC-Anlagen vielfach hohe Dauerbelastungen durch Biegewechsel, enge Radien, Abrieb, Schmutz, Feuchtigkeit und Hitze verkraften.
Mit den M12-Push/Pull-Steckverbindern in Steckerausführung mit Innenverriegelung erweitert Escha sein Portfolio industrieller Verbindungstechnik für anspruchsvolle Anwendungen.
OndoSense hat ein Messsystem zur Füllstandskontrolle von bis zu 1.600° heißen Aluminium-, Stahl- oder Kupferschmelzen in geschlossenen Öfen entwickelt: Mit der neuen…
Baumer hat auf der Hannover Messe ein umfassendes IO-Link-Gesamtpaket präsentiert, das eine durchgängige, hochgeschwindige Datenkommunikation vom Sensor bis zur SPS ermöglicht.
Um Einsatzkräften künftig einen sichereren Einsatz zu ermöglichen hat das Deutsche Zentrum für Luft- und Raumfahrt mehrere Systeme entwickelt, mit denen sich…
Während der Fußball weltweit viele Menschen begeistert, rückt auch die Technologie hinter dem Spiel in den Fokus. Dassault Systèmes zeigt, wie Engineering,…
Im Diskurs rund um Nachhaltigkeit und Kreislaufwirtschaft liegt der Fokus meist auf Konsumgütern: recyclingfähige Verpackungen, biobasierte Materialien oder textile Wiederverwertung dominieren die…
Sein Tool Monitoring AI Solution hat THK jetzt um eine Anbindung an CNC-Steuerungen von Fanuc erweitert. Diese Konnektivität ermöglicht eine schnellere Installation…
Um KMU beim Einsatz von Robotik zu unterstützen, wollen die Beteiligten am Forschungsprojekt ‚Akimi‘ Large Language Models mit robotischen Basisfunktionen verbinden. Projektstart…
Maschinendaten gelten als Grundlage für digitale Services, KI-Anwendungen und neue Geschäftsmodelle. Gleichzeitig steigen die Anforderungen an Cybersecurity, Compliance und Datensouveränität. Gemeinsam mit…
KeeQuant, Collaider und Noris Network haben eine souveräne KI-Architektur vorgestellt, mit der die drei Unternehmen vertrauenswürdige deutsche Infrastruktur, spezialisierte KI-Anwendungen und quantengesicherte…
Edge Computing und Cloud-Technologien verändern den Umgang mit Produktionsdaten. Maschinen- und Sensordaten lassen sich heute standortunabhängig erfassen, visualisieren und analysieren. Das schafft…
Der wirtschaftliche Wert von Daten entsteht erst, wenn sie nahtlos zwischen Produktion und Corporate IT fließen. Diese Konvergenz von Information Technology (IT)…