Ungünstige Belastung und dauerhafte Überlastung der Wirbelsäule sind mit Abstand die häufigsten Ursachen für Rückenschmerzen. Betroffen sind unzählige Menschen und viele Krankschreibungen und Frühverrentungen sind die Folge, vor allem dann, wenn die Beschwerden chronisch werden. Die Folgekosten für Wirtschaft und Gesundheitssysteme der Industrieländer sind enorm. Dabei ist die Fehlbelastung eigentlich leicht zu vermeiden, wenn man sich an eine simple Grundregel hält: Lasten heben immer aus den Beinen heraus, und nur mit aufrechtem Oberkörper. Allerdings lässt sich dies im Alltag bei vielen Arbeiten oft nicht befolgen. Wer einem Patienten aus dem Bett hilft, ein Paket aus dem Lieferwagen wuchtet, in der Fertigung mit schweren Teilen hantiert oder auf dem Bau mit großen Handmaschinen arbeitet, kann die Bewegungen nicht immer ergonomisch korrekt ausführen. Das gehobene Gewicht drückt dann unweigerlich auf die gebeugte Wirbelsäule. Der Hebeleffekt, der dabei entsteht, ist beachtlich: Je nach Grad der Beugung kann ein 10kg-Paket dann durchaus mit bis zu 50kg auf die lumbalen Bandscheiben der unteren Wirbelsäule drücken. Diese natürlichen Stoßdämpfer aus Faserknorpel sind zwar ausgesprochen zäh und widerstandsfähig, doch sie altern mit den Jahren und können zudem bei häufiger Fehlbelastung frühzeitig verschleißen. Das hat häufig schmerzhafte Konsequenzen wie einen Bandscheibenvorfall.
Bandscheiben vor ungünstiger Belastung schützen
„Wenn sich die Fehlbelastung nicht konsequent vermeiden lässt, sollte man über entlastende Maßnahmen nachdenken“, meint Antoine Noel. Der Robotik-Ingenieur hat 2015 zusammen mit Amelie Blondeaux und Damien Bratic in Lille das Unternehmen Japet gegründet. „Unser Ziel war es, ein aktives Stützkorsett für die Lendenwirbelsäule zu entwickeln. Ungünstige Belastungen sollen durch Motorkraft ausgeglichen werden, sodass die Bandscheiben geschützt werden.“ Das Ergebnis der Entwicklungsarbeit ist das Exoskelett „Japet.W“.
Das Stützkorsett für die Lendenwirbelsäule besteht im Wesentlichen aus zwei Gurten, die durch vier Aktoren – je zwei pro Körperseite – miteinander verbunden sind. Der obere Gurt stützt den Rücken, der untere sitzt auf den Hüften auf. Die Aktoren sind sogenannte seriell-elastische Aktoren (SEA). Sie spüren eine auf sie einwirkende Kraft und arbeiten dann mit der integrierten Antriebstechnik dagegen. Die wichtigsten Elemente sind ein Motor, eine Spindel und eine Feder. Ein Potenziometer misst die einwirkende Kraft, z.B. wenn der Träger des Exoskeletts sich nach vorne beugt und ein Gewicht anhebt. Dieses Messsignal steuert den Motor, der über ein Getriebe mit der Antriebsspindel gekoppelt ist. Die Spindel dreht sich und überträgt so die Motorkraft auf die Feder. Diese drückt dann vom unteren auf den oberen Gurt, stützt dadurch den Oberkörper und entlastet so die Lendenwirbelsäule. Das Maß der Entlastung kann der Träger des Exoskeletts in vier Stufen wählen. Die Steuerung und die Batterie des Geräts sind in den Doppelgurt integriert.
„Die Hüften werden durch den zusätzlichen Druck nur geringfügig belastet; ohnehin vertragen sie auch größere Gewichte ohne Probleme“, ergänzt Noel. „Die Krafteinwirkung auf die Lendenwirbelsäule wird hingegen stark reduziert. Vor allem die übermäßige Belastung der Bandscheiben in einer gebeugten Position wird damit deutlich verringert oder sogar ganz vermieden. Zugleich wird auch die Haltung des Oberkörpers verbessert.“

Mit passenden Motoren zur Serienreife
Auf einer Fachmesse sind die Gründer von Japet dem Antriebshersteller Faulhaber begegnet. Das französische Unternehmen war damals noch ein technisches Versuchslabor in einem Nebenraum einer nordfranzösischen Klinik und von serienreifen Produkten weit entfernt. In ihre ersten Testgeräte hatten die drei Jungunternehmer lärmende Billigmotoren eingebaut, die sich obendrein auch noch schlecht steuern ließen. Die Experten von Faulhaber fanden Gefallen an der Idee und unterstützten die spannende Entwicklungsarbeit durch Beratung und Gratismuster industrietauglicher Motoren, die der anspruchsvollen Anwendung gerecht werden konnten. „Das war ein wichtiger Beitrag, um unser Produkt serienreif zu machen“, betont Antoine Noel.
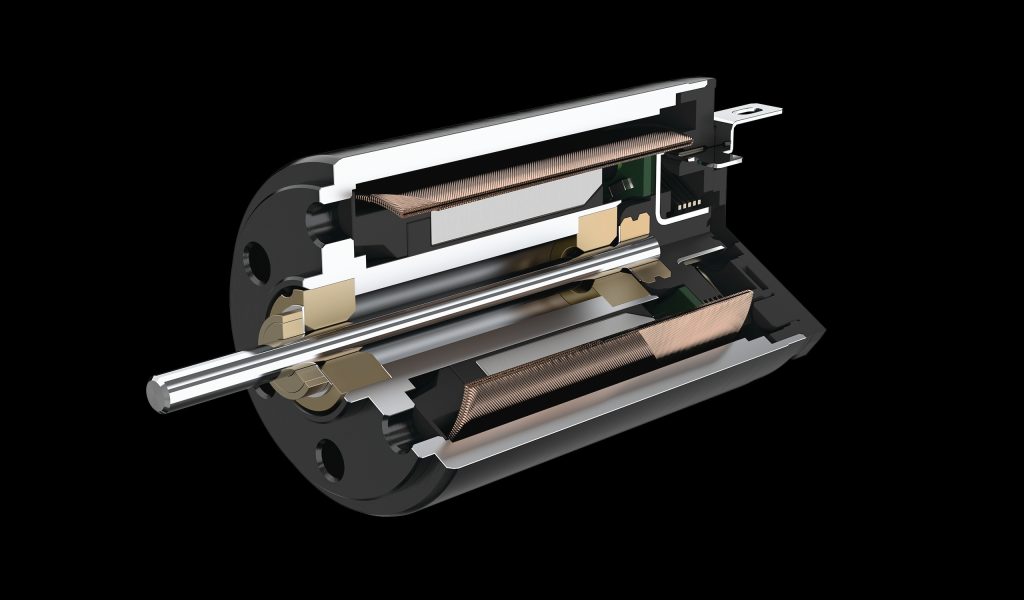
Im Exoskelett Japet.W liefern jetzt vier DC-Motoren mit Edelmetallkommutierung der Serie 1524…SR die Stützkraft zur Entlastung der Wirbelsäule. Die edelmetallkommutierten Gleichstrommotoren sind bei 15mm Durchmesser lediglich 24mm lang, bauen also sehr kompakt und benötigen nur wenig Einbauraum, was der beschriebenen Anwendung natürlich entgegenkommt. Sie liefern ein Dauerdrehmoment bis 2,8mNm bei Drehzahlen bis 4.500U/min. Die DC-Kleinstmotoren unterscheiden sich von herkömmlichen Ausführungen hauptsächlich durch den Rotor. Dieser ist nicht auf einen Eisenkern gewickelt, sondern besteht aus einer freitragenden, in Schrägwicklung hergestellten Kupferspule. Der leichte Rotor bietet mit seinem geringen Trägheitsmoment und rastmomentfreien Lauf, was wiederum der Dynamik zugutekommt.
Für die Kraftübertragung sind Planetengetriebe der Serie 15A mit einer Untersetzung von 52:1 zuständig. Da das Gerät naturgemäß am Körper getragen wird, der zudem entlastet werden soll, kommt es auf jedes Gramm an. Auch hier können die Antriebe punkten. Mit nur jeweils 18g pro Motor machen sie nur einen Bruchteil der Gesamtmasse aus. Trotzdem sind sie stark genug, um über einen Arbeitstag den Bandscheiben des Trägers insgesamt das Gewicht von drei bis vier Mittelklasseautos abzunehmen. Die entsprechende Ansteuerung ließ sich zudem gut in die Steuerung des Exoskeletts integrieren.

Qualität und Zuverlässigkeit
Neben dem Verhältnis von Volumen und Kraft zählen für Japet auch Qualität und Zuverlässigkeit zu den entscheidenden Kriterien: „Das Exoskelett ist ein zertifiziertes Medizinprodukt“, erklärt Noel. „Da gelten höchste Anforderungen. Außerdem muss das Gerät seine Träger im Dauerbetrieb unterstützen, über lange Zeit und möglichst ohne jede Wartung. Das wird mit den Antrieben von Faulhaber möglich.“