Die Haushaltsgeräte-Industrie produziert jährlich über 800 neue Modelle von Trocknern, Waschmaschinen, Kühlschränken, Herden und Backöfen. Die meist aus Kunststoff- und Blechteilen bestehenden Verkleidungen und Interieurteile der Weißen Ware müssen sowohl ästhetischen Ansprüchen genügen als auch zeit- und kosteneffizient produziert werden. Somit sind auch QS-Prozesse zu optimieren, zu verschlanken und zu beschleunigen. In der 3D-Messtechnik wird dies u.a. durch automatisierte Haltevorrichtungen erreicht, die in optischen Messanlagen (z.B. ScanBoxen) herkömmliche, bauteilspezifische Messvorrichtungen ersetzen. Eine Waschmaschine besteht allerdings aus ca. 2.000 Einzelteilen, von denen nahezu alle auf ihre Passgenauigkeit für den Zusammenbau überprüft werden müssen. Noch vor wenigen Jahren wurde für nahezu jedes zu messende Teil eine individuelle physische Vorrichtung erstellt. Bei Bauteiländerungen konnten diese nur zeit- und kostenintensiv modifiziert werden. Mit jährlich 800 neuen Haushaltsgeräten entsteht eine unüberschaubare Flut an Vorrichtungen, deren Produktion enorme Mengen an Energie und Material beansprucht – ein ressourcenintensiver Prozess, der ökologisch kaum nachhaltig ist.
Virtual Clamping & automatisierte Aufnahmetechnik
Inzwischen hat die Digitalisierung die Messtechnik erreicht und ermöglicht im Zusammenspiel aus automatisierten Vorrichtungssystemen, Virtual Clamping Technology und einer Zeiss ScanBox einen deutlich effizienteren und kostengünstigeren Scan-Prozess. Mit den Poly-Robot-Automated-Fixture-System (PRAFS) von Protos-3D laufen Messprozesse deutlich effektiver ab. PRAFS ist ein universelles Vorrichtungssystem, das für eine unbegrenzte Anzahl unterschiedlicher Bauteile in der Zeiss ScanBox eingesetzt wird. Individuelle, physische Vorrichtungen gehören damit der Vergangenheit an.
Bis zu 1.400mm große Bauteile positionieren und scannen
Während die erste PRAFS Variante 3620 mit sechs Robotern für Bauteile bis zu 3.000mm ausgelegt ist, kommen mit den neuen Modellen 2410 und 2414 nun kompaktere Systeme auf dem Markt. Diese sind für Bauteilgrößen von maximal 1.000 bzw. 1.400mm konzipiert. Beide Modelle arbeiten mit vier Robotern als Bauteilauflage. Es sind mobile, automatisierte Vorrichtungen, die mit Hilfe eines Hebewerkzeuges schnell auf dem Drehteller der ScanBox platziert und befestigt werden. Mit nur einem Stecker lässt sich PRAFS anschließen und aktivieren. Die Bauteildaten werden zuerst in die Zeiss-Inspect Software übertragen und dort mit den vorhandenen Tools über der PRAFS positioniert. Anschließend erfolgt die Programmierung in der Emusim-Software, wo die zwei, drei oder vier Roboter-Auflagepositionen innerhalb weniger Minuten festgelegt werden – ganz ohne Roboterpanel oder spezielle Programmierkenntnisse.
Präzise Bauteil-Positionierung
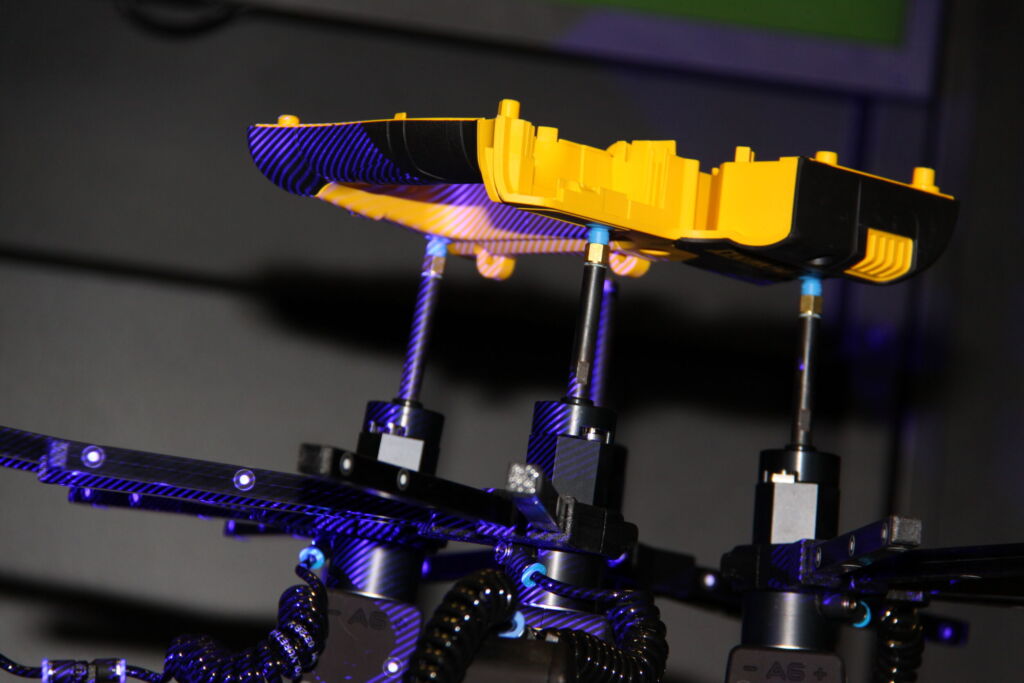
Nach der Programmierung werden die Roboterprogramme auf die PRAFS-Anlage übertragen, und der gesamte Messaufbau wird real getestet. Wenn der Bediener das Bauteil über das HMI aufruft, wird der Umriss des Bauteils sowie das Bauteil selbst per Augmented Reality auf einem Bildschirm angezeigt, genau in der vorgesehenen Einlegeposition. Der Vorteil der Visualisierung bietet klare Vorteile: Statt zusätzlicher Referenz-Roboter wird ein Vision-System mit Kamera und Bildschirm, montiert an der Rückwand der ScanBox, eingesetzt. Dies ermöglicht eine einfache Positionierung des Bauteils. Dadurch reduziert sich auch die Anzahl der erforderlichen Roboter von sechs auf vier. Dieser Prozess kann für tausende Bauteile offline vorbereitet und in kürzester Zeit abgerufen werden.