In den 1920er-Jahren war es der Konflikt zwischen der bereits etablierten elektrischen Antriebstechnik im städtischen Nahverkehr und der neu aufkommenden Telekommunikation, der zur Entwicklung der Funkentstörung, eines Teilkonzepts der EMV, führte. Elektrische Antriebe sind heute meist geregelt, neben der Energiewandlung enthalten sie also auch die für die Sensorik zur Datenübertragung nötigen Telekommunikationsbauteile. Wegen der Störaussendung der Energiewandlung muss deswegen die nötige Störfestigkeit der Sensorik und Telekommunikation gegeben sein, und das oft auf engstem Raum.

Zertifizierung in der Anwendung
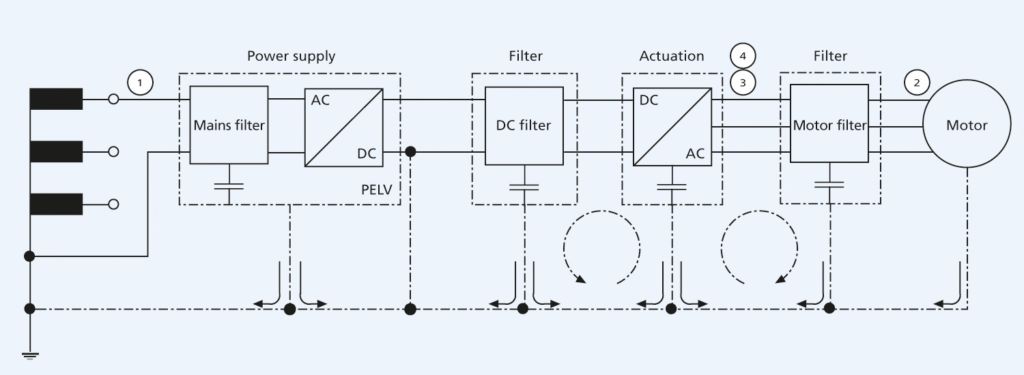
Die Grenzwerte für geregelte elektrische Antriebe sowohl für die Störaussendung als auch für die Störfestigkeit sind heute in der EN61800-3 festgelegt. Allerdings dient die Norm lediglich als Basis zur Bewertung eines betriebsfertig aufgebauten Antriebs. Wie sich dieser im Endgerät verhält, lässt sich nicht verbindlich vorhersehen. Hier ist der Anwender in der Pflicht, die für seine Applikation gültige Zertifizierung zu erreichen. In Systemen mit elektrischen Kleinantrieben wird die elektrische Energie meist mehrfach umgeformt. Dabei treten elektrische Wechselgrößen als Spannungen und Ströme mit sehr unterschiedlichen Frequenzen auf, z.B. Schaltvorgänge in der Endstufe, (elektro)magnetische Störfelder beim dynamischen Betrieb oder auch Spannungsschwankungen (Ripple), wenn die Antriebe schalten.
Während für Geräte im europäischen Binnenmarkt die EMV-Richtline 2014/30/EU gilt, wird die konkrete Bewertung anhand der sogenannten harmonisierten Normen vorgenommen. Eine durch das CE-Zeichen erkennbare Konformität zur EMV-Richtline ist verpflichtend. Aber auch bei Geräten, die nicht im europäischen Binnenmarkt in den Verkehr gebracht werden oder für industrielle Weiterverwender bestimmt sind, ist oft ein Nachweis der Konformität erforderlich. Hier greifen die Fachgrundnormen EN61000-4-x und EN61000-6-x, je nachdem ob die Geräte für den Industrieeinsatz oder den Consumer-Bereich bestimmt sind.
Grenzwerte für geregelte Antriebe
Für die Bewertung eines betriebsfertig aufgebauten Antriebs bestehend aus Motor und direkt am Netz betriebenen Umrichter bzw. Motion Controller bildet die EN61800-3 die Basis. Sie definiert auch die Regeln für den Messaufbau. Dabei gelten unterschiedliche Quantifizierungen für die Störungen: Im Frequenzbereich von 150kHz bis 30MHz werden sie als Störspannung in dB(µV) definiert, im Frequenzbereich von 30 bis 300MHz als Störleistung in dB(pW) und im Bereich von 30MHz bis 6GHz als Störfeldstärke in dB(µV/m).
Der Ansatz geht davon aus, dass niederfrequente Wechselgrößen vor allem als eine der Versorgung eines Netzteils überlagerten Störspannung beobachtet werden. Die pulsierenden Ströme eines geregelten Antriebs könnten dann z.B. den Betrieb einer parallel angeschlossenen SPS beeinträchtigen. Ebenso könnte eine Spannungsspitze in der Versorgung während eines Bremsvorgangs parallel angeschlossene Geräte zur Schutzabschaltung veranlassen. Die Störleistung und Störfeldstärke dagegen beschreiben die nicht an Leitungen gebundene Ausbreitung von elektromagnetischen Feldern.

Störfeldstärke als Herausforderung
Während der Zulassung eines Geräts mit integriertem Kleinantrieb ist die Störfeldstärke oft die größere Herausforderung. Maßnahmen dagegen sind z.B. Filter an den Leistungsausgängen, um hochfrequente kapazitive Störströme zu unterbinden. Meist muss zudem jede Motorleitung vollständig geschirmt sein. Gleiches gilt für die – getrennt davon verlegte – Sensorleitung. Wichtig ist außerdem, alle leitfähigen Teile über eine sogenannte Funktionserdung leitend zu verbinden und zwar mit HF-Schirmverbindern. Auf dieser Funktionserdung aufbauend können dann beide Seiten des Schirms flächig aufgelegt werden. Eine reine PE-Schutzerdung genügt in den seltensten Fällen.