Während durch die Funktionserdung und die geschirmten Leitungen die Störfeldstärke wirkungsvoll gedämpft wird, steigt der in der Grundplatte zurückfließende Wechselstromanteil dadurch eher noch an. Fließen diese Wechselströme über das Netz bzw. das Netzteil zum Schaltwandler zurück, steigt unweigerlich der Wechselspannungsanteil auf der Versorgungsleitung und damit die Störspannung. Daher wird oft in der Zuleitung ein zusätzlicher Filter nötig, der die Ausbreitung dieser Ströme begrenzt. Dem Gerätebauer ist freigestellt, ob er einen solchen Filter vor jedem einzelnen Antrieb verbaut – bei Kleinantrieben typischerweise in der 24V- oder 48V-Zuleitung – oder erst vor dem Netzteil auf der AC-Seite. Letzteres spart Kosten, funktioniert aber nur, wenn die Antriebe selbst so ausgelegt sind, dass sie sich nicht gegenseitig stören.
Störfestigkeit in den Normprüfungen
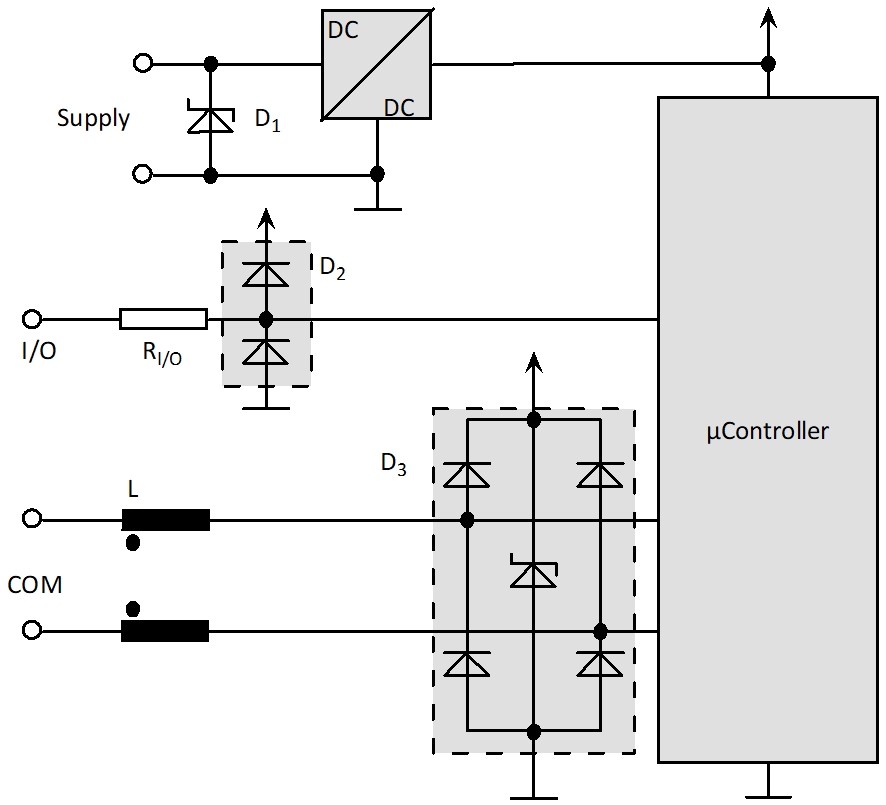
Für die Störfestigkeit werden verschiedenste elektromagnetische Effekte in den Normprüfungen abgedeckt, wie beispielsweise die Störfestigkeit gegen die Entladung statischer Elektrizität (ESD) sowie gegen hochfrequente elektromagnetische Felder von einem benachbarten Sender, die Störfestigkeit gegen schnelle transiente elektrische Störgrößen (Burst), Stoßspannungen (Surge), z.B. durch Blitzschlag, oder gegen HF-Gleichtaktstörungen auf längeren Sensor- und Kommunikationsleitungen. Eher für direkt am Netz betriebenen Antriebe sind noch Prüfungen bezüglich kurzzeitiger Spannungseinbrüche definiert. Die typischen Spannungsschwankungen von mehreren dynamischen Antrieben an einem DC-Netz dagegen sind nicht wirklich erfasst. Zusätzliche Entstörmaßnahmen können hier gerade beim Kleinantrieb möglichst kurze Leitungen oder Schutzdioden auf der Versorgungsseite sein. Zusätzlich sind Ferritfilter möglich, wie sie z.B. auch auf analogen PC-Monitor- oder Kommunikationsleitungen üblich sind.
Die Hauptherausforderung für die Störfestigkeit der Komponenten sind bei kompakten Antrieben die Encoder. Sie müssen ebenfalls auf minimalem Bauraum untergebracht werden. Selbst in kleinen Encodern kann jedoch ein ausreichender Schutz gegen ESD durch kompakte Schutzelemente erreicht werden. Die für die Störfestigkeit angegebenen Feldstärken stellen in der Regel weder im HF- noch im Netzfrequenzbereich ein Problem dar. Störfestigkeit gegen Bursts, also schnelle Transienten, erfordert Filter sowohl auf den Versorgungsanschlüssen als auch auf den Signalleitungen. Das ist aber bereits auf den Versorgungsanschlüssen ein Problem, da die Versorgungsspannung typischerweise direkt an die im Encoder integrierten Schaltkreise angeschlossen ist. Ein wirksamer Schutz ist hier nur im Gesamtgerät möglich. Ein vollständiger Schutz direkt in den Encodern gegen Normstörgrößen ist in der Regel nicht nötig. Falls doch, könnte eine Schutzdiode z.B. in einer Adapterplatine verbaut werden.
Das Prüfsignal für leitungsgeführte HF-Störungen nach IEC61000-4-6 ist größer als das Nutzsignal typischer Encoder. Gleichtaktfilter in einem Encoder bei Motordurchmessern von lediglich noch 20 bis 22mm sind jedoch nicht realisierbar. Hier muss auf Geräteebene bewertet werden, welche Störgrößen zu erwarten sind. Gegebenenfalls lässt sich die Störfestigkeit mit extern aufgebrachten Ferriten verbessern. Spannungseinbrüche an der Versorgung des Antriebssystems können zur Abschaltung des Systems führen. Abhängig vom Puffer der Encoder-Versorgung im Motion Controller kann dann bei Spannungseinbrüchen auch der Encoder unterversorgt sein. Inkrementale Encoder verlieren dabei die absolute Positionsinformation und müssen neu referenziert werden.
EMV-gerechte Auslegung und Dokumentation
EMV bei Kleinantrieben ist also für die Anwender keineswegs trivial. Alle Motion Controller des Produktportfolios von Faulhaber entsprechen deshalb den aktuellen EMV-Vorschriften. Nicht nur die Hardware wurde entsprechend ausgelegt, sondern auch die Dokumentation neugestaltet, um den Anwender bei der Zertifizierung des eigenen Geräts bestmöglich zu unterstützen. Weitere Informationen gibt es auf der Internetseite des Anbieters.